Renesas R-Car Spider
Overview
The Renesas R-Car Spider board is the Renesas R-Car S4 reference board and is designed for evaluating features and performance of this SoC.
More information about the board can be found at Renesas R-Car S4 Spider website.
Hardware
Hardware capabilities for the S4 Spider board can be found on the eLinux S4 Spider page.
Note
We support Zephyr running on the CR52 processor that is provided for RTOS purpose.
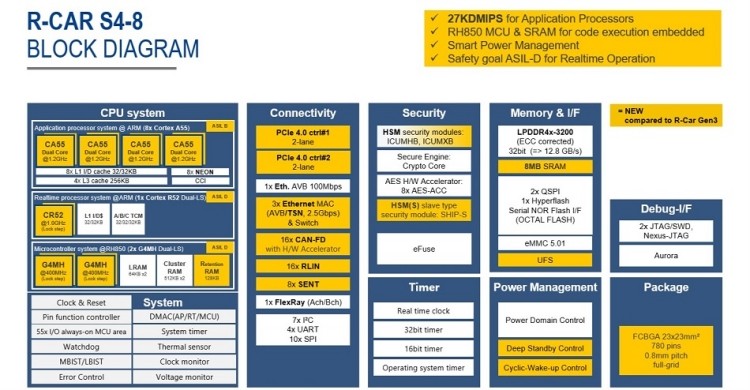
More information about the SoC that equips the board can be found here:
Supported Features
Here are the current supported features when running Zephyr Project on the R-Car S4 Spider CR52:
Interface |
Driver/components |
Support level |
|---|---|---|
PINMUX |
pinmux |
|
CLOCK |
clock_control |
|
GPIO |
gpio |
|
UART |
uart FT232RQ |
serial port-polling serial port-interrupt |
I2C |
i2c |
interrupt driven |
PWM |
pwm |
All channels |
It is also currently possible to write on the ram console.
More features will be supported soon.
Connections and IOs
Here are the official IOs figures from eLinux for S4 board:
{kind=link}
{kind=link}
GPIO
By running Zephyr on S4 Spider, the software controllable LED ‘LED8’ can be used as output.
UART
Here is information about both serial ports provided on the S4 Spider board :
Physical Interface |
Location |
Software Interface |
Converter |
Further Information |
|---|---|---|---|---|
CN20 USB Port |
CPU Board |
SCIF0/HSCIF1 |
FT232HQ |
Default Zephyr serial |
CN21 USB Port |
CPU Board |
SCIF3/HSCIF0 |
FT2232H-56Q |
Used by U-BOOT & Linux |
Note
The Zephyr console output is assigned to SCIF0 (CN20 USB Port) with settings: 115200 8N1 without hardware flow control by default.
I2C
I2C is mainly used to manage and power-on some onboard chips on the S4 Spider board.
Embedded I2C devices and I/O expanders are not yet supported. The current I2C support therefore does not make any devices available to the user at this time.
Programming and Debugging
Build and flash applications as usual (see Building an Application and Run an Application for more details).
Supported Debug Probe
The “Olimex ARM-USB-OCD-H” probe needs to be connected with a “Coresight 20 pins” adapter to CN1 connector on Spider board.
Configuring a Console
Connect a USB cable from your PC to CN20 USB port of your Spider board.
Use the following settings with your serial terminal of choice (minicom, putty, etc.):
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Flashing
First of all, open your serial terminal.
Applications for the rcar_spider_cr52 board configuration can be built in the
usual way (see Building an Application for more details).
# From the root of the zephyr repository
west build -b rcar_spider_cr52 samples/hello_world
west flash
You should see the following message in the terminal:
*** Booting Zephyr OS build v3.3.0-rc2 ***
Hello World! rcar_spider_cr52
Debugging
First of all, open your serial terminal.
Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b rcar_spider_cr52 samples/hello_world
west debug
You will then get access to a GDB session for debugging.
By continuing the app, you should see the following message in the terminal:
*** Booting Zephyr OS build v3.3.0-rc2 ***
Hello World! rcar_spider_cr52