SAM4S Xplained
Overview
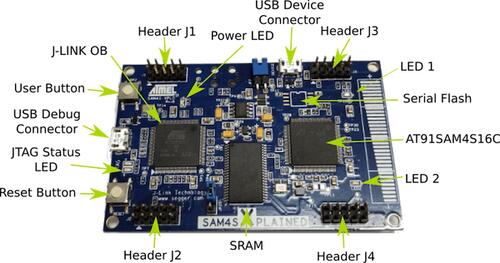
The SAM4S Xplained evaluation kit is a development platform to evaluate the Atmel SAM4S series microcontrollers.
Hardware
ATSAM4S16C ARM Cortex-M4 Processor
12 MHz crystal oscillator
internal 32.768 kHz crystal oscillator
IS66WV51216DALL 8 Mb SRAM
Micro-AB USB device
Micro-AB USB debug interface supporting SEGGER OB and Virtual COM Port and Data
One reset and one user pushbutton
2 yellow user LEDs
IC pads for external flash chip
Supported Features
The sam4s_xplained board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
SYSTICK |
on-chip |
systick |
UART |
on-chip |
serial port |
USART |
on-chip |
serial port |
I2C |
on-chip |
i2c |
SPI |
on-chip |
spi |
WATCHDOG |
on-chip |
watchdog |
GPIO |
on-chip |
gpio |
HWINFO |
on-chip |
Unique device serial number |
SMC |
on-chip |
memc (PSRAM) |
PWM |
on-chip |
pwm |
Other hardware features are not currently supported by Zephyr.
The default configuration can be found in the Kconfig boards/arm/sam4s_xplained/sam4s_xplained_defconfig.
Connections and IOs
Download the SAM4S Xplained Design Files 2 for more information. It has full schematic and gerbers files.
System Clock
The SAM4S MCU is configured to use the 12 MHz internal oscillator on the board with the on-chip PLL to generate an 84 MHz system clock.
Serial Port
The ATSAM4S16C MCU has 2 UARTs and 2 USARTs. One of the UARTs (UART0) is connected to the Segger J-Link OB chip (the AT91SAM3U4 is programmed to be Segger J-Link OB). Segger J-Link OB brings the UART out as a virtual COM port. The section flashing uses the UART from the Segger USB debug connection.
Programming and Debugging
The SAM4S Xplained board comes with Segger J-Link OB. This provides a debug interface to the SAM4S16C chip. You can use Ozone or JLink to communicate with the SAM4S16C.
Flashing
For flash the board Zephyr provides two paths. One uses the default JLink tool and the second one uses SAM Boot Assistant (SAM-BA).
Using JLink
Download JLink from the Segger JLink Downloads Page 1. Go to the section “J-Link Software and Documentation Pack” and install the “J-Link Software and Documentation pack for Linux”. The application JLinkExe needs to be accessible from your path.
Connect the SAM4S Xplained board to your host computer using the USB debug port. Then build and flash the Hello World application.
# From the root of the zephyr repository west build -b sam4s_xplained samples/hello_world west flash
Using SAM-BA bootloader
Close the
J25jumper on the SAM4S Xplained board. Power on the board for 10s.Open the
J25jumper.Connect the SAM4S Xplained board to your host computer using the SoC USB port. Then build and flash the Hello World application.
# From the root of the zephyr repository west build -b sam4s_xplained samples/hello_world
$ west flash -r bossac
Visualizing the message
Run your favorite terminal program to listen for output. Under Linux the terminal should be
/dev/ttyACM0. For example:$ minicom -D /dev/ttyACM0 -o
The -o option tells minicom not to send the modem initialization string. Connection should be configured as follows:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Press reset button
You should see “Hello World! sam4s_xplained” in your terminal.
Debugging
You can debug an application in the usual way. Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b sam4s_xplained samples/hello_world
west debug