First Things First
Prerequisite
Trusted Firmware M provides a reference implementation of platform security architecture reference implementation aligning with PSA Certified guidelines. It is assumed that the reader is familiar with specifications can be found at Platform Security Architecture Resources.
The current TF-M implementation specifically targets TrustZone for ARMv8-M so a good understanding of the v8-M architecture is also necessary. A good place to get started with ARMv8-M is developer.arm.com.
Build and run instructions
Trusted Firmware M source code is available on git.trustedfirmware.org.
To build & run TF-M:
Follow the this guide to set up and check your environment.
Follow the Build instructions to compile and build the TF-M source.
Follow the Run TF-M examples on Arm platforms for information on running the example.
To port TF-M to a another system or OS, follow the OS Integration Guide
Contributing Guidelines contains guidance on how to contribute to this project.
Set up build environments
TF-M officially supports a limited set of build environments and setups. In this context, official support means that the environments listed below are actively used by team members and active developers, hence users should be able to recreate the same configurations by following the instructions described below. In case of problems, the TF-M team provides support only for these environments, but building in other environments can still be possible.
The following environments are supported:
version supported:
Ubuntu 18.04 x64+
install dependencies:
sudo apt-get install -y git curl wget build-essential libssl-dev python3 \
python3-pip cmake make
verify cmake version:
cmake --version
Note
Please download cmake 3.15 or later version from https://cmake.org/download/.
add CMake path into environment:
export PATH=<CMake path>/bin:$PATH
version supported:
Windows 10 x64
install dependecies:
Git client latest version (https://git-scm.com/download/win)
CMake (native Windows version)
GNU make (http://gnuwin32.sourceforge.net/packages/make.htm)
Python3 (native Windows version) and the pip package manager (from Python 3.4 it’s included)
add CMake path into environment:
set PATH=<CMake_Path>\bin;%PATH%
Install python dependencies
Clone the TF-M source code, and then install the TF-M’s additional Python dependencies.
get the TF-M source code:
git clone https://git.trustedfirmware.org/TF-M/trusted-firmware-m.git
TF-M’s
tools/requirements.txtfile declares additional Python dependencies. Install them withpip3:
pip3 install --upgrade pip
cd trusted-firmware-m
pip3 install -r tools/requirements.txt
get the TF-M source code:
git clone https://git.trustedfirmware.org/TF-M/trusted-firmware-m.git
TF-M’s
tools/requirements.txtfile declares additional Python dependencies. Install them withpip3:
cd trusted-firmware-m
pip3 install -r tools\requirements.txt
Install a toolchain
To compile TF-M code, at least one of the supported compiler toolchains have to be available in the build environment. The currently supported compiler versions are:
Arm Compiler v6.13 ~ v6.14, v6.18+
Download the standalone packages from here.
Add Arm Compiler into environment:
export PATH=<ARM_CLANG_PATH>/bin:$PATH export ARM_PRODUCT_PATH=<ARM_CLANG_PATH>/sw/mappingsConfigure proper tool variant and license.
Download the standalone packages from here.
Add Arm Compiler into environment:
set PATH=<ARM_CLANG_PATH>\bin;%PATH% set ARM_PRODUCT_PATH=<ARM_CLANG_PATH>\sw\mappingsConfigure proper tool variant and license.
Note
Arm compiler v6.15 ~ v6.17 may cause MemManage fault. This defect has been fixed since Arm compiler v6.18. See [SDCOMP-59788] in Armclang v6.18 release note for details.
GNU Arm compiler v7.3.1+
Download the GNU Arm compiler from here.
Add GNU Arm into environment:
export PATH=<GNU_ARM_PATH>/bin:$PATH
Download the GNU Arm compiler from here.
Add GNU Arm into environment:
set PATH=<GNU_ARM_PATH>\bin;%PATH%Note
GNU Arm compiler version 10-2020-q4-major has an issue in CMSE support. The bug is reported in here. Select other GNU Arm compiler versions instead.
IAR Arm compiler v8.42.x, v8.50.x
Build AN521 regression sample
Here, we take building TF-M for AN521 platform with regression tests using GCC as an example:
Get the TF-M tests source code:
git clone https://git.trustedfirmware.org/TF-M/tf-m-tests.git
Build SPE and NSPE.
cd </tf-m-tests/tests_reg>
cmake -S spe -B build_spe -DTFM_PLATFORM=arm/mps2/an521 -DCONFIG_TFM_SOURCE_PATH=<TF-M source dir absolute path> \
-DCMAKE_BUILD_TYPE=Debug -DTFM_TOOLCHAIN_FILE=<TF-M source dir absolute path>/toolchain_GNUARM.cmake \
-DTEST_S=ON -DTEST_NS=ON \
cmake --build build_spe -- install
cmake -S . -B build_test -DCONFIG_SPE_PATH=<tf-m-tests absolute path>/tests_reg/build_spe/api_ns \
-DCMAKE_BUILD_TYPE=Debug -DTFM_TOOLCHAIN_FILE=<tf-m-tests absolute path>/tests_reg/build_spe/api_ns/cmake/toolchain_ns_GNUARM.cmake
cmake --build build_test
Important
Use “/” instead of “\” when assigning Windows paths to CMAKE variables, for example, use “c:/build” instead of “c:\\build”.
Get the TF-M tests source code:
git clone https://git.trustedfirmware.org/TF-M/tf-m-tests.git
Build SPE and NSPE.
cd </tf-m-tests/tests_reg>
cmake -G"Unix Makefiles" -S spe -B build_spe -DTFM_PLATFORM=arm/mps2/an521 -DCONFIG_TFM_SOURCE_PATH=<TF-M source dir absolute path> \
-DCMAKE_BUILD_TYPE=Debug -DTFM_TOOLCHAIN_FILE=<TF-M source dir absolute path>/toolchain_GNUARM.cmake \
-DTEST_S=ON -DTEST_NS=ON \
cmake --build build_spe -- install
cmake -G"Unix Makefiles" -S . -B build_test -DCONFIG_SPE_PATH=<tf-m-tests absolute path>/tests_reg/build_spe/api_ns \
-DCMAKE_BUILD_TYPE=Debug -DTFM_TOOLCHAIN_FILE=<tf-m-tests absolute path>/tests_reg/build_spe/api_ns/cmake/toolchain_ns_GNUARM.cmake
cmake --build build_test
Note
The latest Windows support long paths, but if you are less lucky
then you can reduce paths by moving the build directory closer to
the root by changing the -B option of the commands, for example,
to C:\build_spe and C:\build_test folders.
Run AN521 regression sample
Run the sample code on SSE-200 Fast-Model, using FVP_MPS2_AEMv8M provided by Arm Development Studio.
Note
Arm Development Studio is not essential to develop TF-M, you can skip this section if don’t want to try on Arm develop boards.
install Arm Development Studio to get the fast-model.
Download Arm Development Studio from here.
Add
bl2.axfandtfm_s_ns_signed.binto symbol files in Debug Configuration menu.
<DS_PATH>/sw/models/bin/FVP_MPS2_AEMv8M \
--parameter fvp_mps2.platform_type=2 \
--parameter cpu0.baseline=0 \
--parameter cpu0.INITVTOR_S=0x10000000 \
--parameter cpu0.semihosting-enable=0 \
--parameter fvp_mps2.DISABLE_GATING=0 \
--parameter fvp_mps2.telnetterminal0.start_telnet=1 \
--parameter fvp_mps2.telnetterminal1.start_telnet=0 \
--parameter fvp_mps2.telnetterminal2.start_telnet=0 \
--parameter fvp_mps2.telnetterminal0.quiet=0 \
--parameter fvp_mps2.telnetterminal1.quiet=1 \
--parameter fvp_mps2.telnetterminal2.quiet=1 \
--application cpu0=<build_spe>/api_ns/bin/bl2.axf \
--data cpu0=<build_test>/tfm_s_ns_signed.bin@0x10080000
Note
The log is output to telnet by default. It can be also redirected to stdout by adding the following parameter.
--parameter fvp_mps2.UART0.out_file=/dev/stdout
To automatically terminate the fast-model when it finishes running, you can add the following parameters:
--parameter fvp_mps2.UART0.shutdown_on_eot=1
install Arm Development Studio to get the fast-model.
Download Arm Development Studio from here.
Add
bl2.axfandtfm_s_ns_signed.binto symbol files in Debug Configuration menu.
<DS_PATH>\sw\models\bin\FVP_MPS2_AEMv8M \
--parameter fvp_mps2.platform_type=2 \
--parameter cpu0.baseline=0 \
--parameter cpu0.INITVTOR_S=0x10000000 \
--parameter cpu0.semihosting-enable=0 \
--parameter fvp_mps2.DISABLE_GATING=0 \
--parameter fvp_mps2.telnetterminal0.start_telnet=1 \
--parameter fvp_mps2.telnetterminal1.start_telnet=0 \
--parameter fvp_mps2.telnetterminal2.start_telnet=0 \
--parameter fvp_mps2.telnetterminal0.quiet=0 \
--parameter fvp_mps2.telnetterminal1.quiet=1 \
--parameter fvp_mps2.telnetterminal2.quiet=1 \
--application cpu0=<build_spe>/api_ns/bin/bl2.axf \
--data cpu0=<build_test>/tfm_s_ns_signed.bin@0x10080000
Note
To automatically terminate the fast-model when it finishes running, you can add the following parameters:
--parameter fvp_mps2.UART0.shutdown_on_eot=1
After completing the procedure you should see the following messages on the DAPLink UART (baud 115200 8n1):
...
#### Execute test suites for the Secure area ####
Running Test Suite PSA protected storage S interface tests (TFM_S_PS_TEST_1XXX)...
> Executing 'TFM_S_PS_TEST_1001'
Description: 'Set interface'
TEST: TFM_S_PS_TEST_1001 - PASSED!
> Executing 'TFM_S_PS_TEST_1002'
Description: 'Set interface with create flags'
TEST: TFM_S_PS_TEST_1002 - PASSED!
> Executing 'TFM_S_PS_TEST_1003'
Description: 'Set interface with NULL data pointer'
TEST: TFM_S_PS_TEST_1003 - PASSED!
> Executing 'TFM_S_PS_TEST_1005'
Description: 'Set interface with write once UID'
TEST: TFM_S_PS_TEST_1005 - PASSED!
....
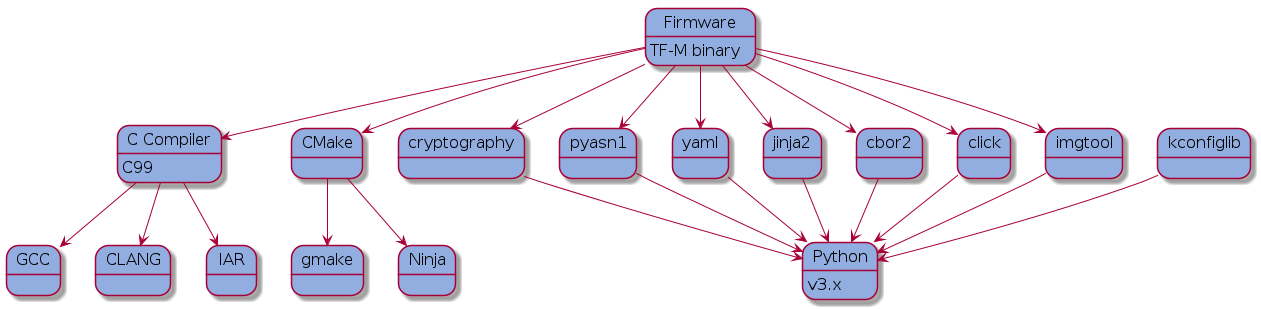
Tool & Dependency overview
To build the TF-M firmware the following tools are needed:
C compiler of supported toolchains
CMake version 3.15 or later
Git
gmake, aka GNU Make
Python v3.x
a set of python modules listed in
tools/requirements.txt
Dependency chain
Next steps
Here are some next steps for exploring TF-M:
Detailed Build instructions.
Try other Samples and Demos.
Copyright (c) 2017-2024, Arm Limited. All rights reserved. Copyright (c) 2022 Cypress Semiconductor Corporation (an Infineon company) or an affiliate of Cypress Semiconductor Corporation. All rights reserved.