Hardware Abstraction Layer
- Organization:
Arm Limited
- Contact:
- API Version:
0.9
Introduction
TF-M HAL abstracts the hardware-oriented and platform specific operations on the SPE side and provides a set of APIs to the upper layers such as SPM, RoT Service. The HAL aims to cover the platform different aspects whereas common architecturally defined aspects are done generically within the common SPE. In some cases, although the operations are defined architecturally, it may not be possible to generalize implementations because lots of information is only known to platforms. It is more efficient to define a HAL API for those architectural operations as well.
Note
TBSA-M provides the hardware requirements for security purposes. TF-M HAL tries to reference TBSA-M recommendations in the interfaces from the software perspective only. Please reference TBSA-M for your security hardware design.
Design Goals
TF-M HAL is designed to simplify the integration efforts on different platforms.
TF-M HAL is designed to make it easy to use the hardware and develop the SPM and RoT Service which need to access the devices.
TF-M HAL is designed to make the structure clearer and let the TF-M mainly focus on PSA implementation.
Overview
This section provides an overview of the abstraction layer structure.
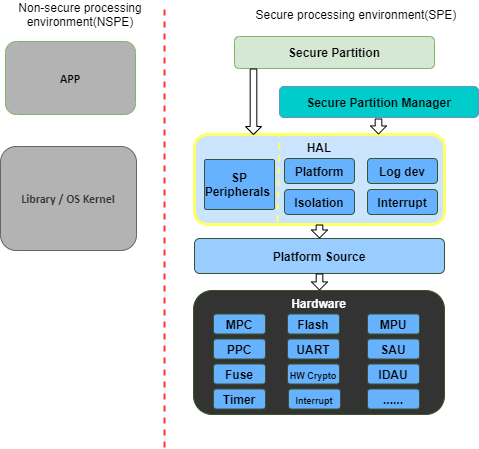
Here lists a minimal set of necessary functionalities:
Isolation API: Provides the necessary isolation functionalities required by the PSA-FF-M and TBSA-M, and provides APIs to SPM to check the permissions of memory access.
Platform API: Provides the platform initialization, platform-specific memory information, system reset, etc.
Log dev API: Provides the log system functions.
Interrupt API: Provides the interrupt functions.
Note
There is a non-secure HAL that focuses on the mailbox operation API for Dual-core topology. For more information about it, please refer to Mailbox Design in TF-M on Dual-core System.
The minimal set of TF-M HAL is sufficient for Secure Partitions by using customized peripheral interfaces. To provide easier portability for the Secure Partitions, a Secure Partition HAL is provided in this design too.
The debug mechanisms give the external entity the corresponding right to access the system assets. TF-M ensures that the external entity is permitted access to those assets. Currently, TF-M only needs the debug authentication. The whole debug mechanism and related HAL will be enhanced in the future. Please refer to the Debug authentication settings section for more details.
Design Principles
As TF-M runs on resource-constrained devices, the HAL tries to avoid multiple level abstractions which cost more resources.
Part of the HAL interfaces does not focus on exact hardware operations such as power on/off or PIN manipulation. Instead, the HAL abstracts higher-level interfaces to reserve the implementation flexibility for the platform vendors.
The TF-M HAL should be easy to deprecate APIs and provide compatibilities. Any API incompatibility should be detected during building.
TF-M relies on the HAL APIs to be implemented correctly and trusts the HAL APIs. TFM can provide assertions to detect common programming errors but essentially no further extensive checks will be provided.
Source Files
This section describes the source file of the TF-M HAL, including the header and c files.
tfm_hal_defs.h
This header file contains the definitions of common macros and types used by all HAL APIs. Please refer to Status Codes for detailed definitions.
tfm_hal_[module].[h/c]
All other headers and c files are classified by the modules, such as isolation, platform, interrupt, devices, etc.
Note
There are common files in the platform folder include the implemented HAL APIs. The platform vendors can use them directly but need to implement all the sub APIs.
Status Codes
These are common status and error codes for all HAL APIs.
Types
tfm_hal_status_t
This is a status code to be used as the return type of HAL APIs.
enum tfm_hal_status_t {
TFM_HAL_ERROR_MEM_FAULT = SCHAR_MIN,
TFM_HAL_ERROR_MAX_VALUE,
TFM_HAL_ERROR_BAD_STATE,
TFM_HAL_ERROR_NOT_SUPPORTED,
TFM_HAL_ERROR_INVALID_INPUT,
TFM_HAL_ERROR_NOT_INIT,
TFM_HAL_ERROR_GENERIC,
TFM_HAL_SUCCESS = 0
};
Error Codes
Negative values indicate an error. Zero and positive values indicate success.
Here is the general list. The detailed usages for each error code are described in the API introduction sections.
TFM_HAL_SUCCESS
Status code to indicate general success.
TFM_HAL_ERROR_GENERIC
Status code to indicate an error that does not correspond to any defined failure cause.
TFM_HAL_ERROR_NOT_INIT
Status code to indicate that the module is not initialed.
TFM_HAL_ERROR_INVALID_INPUT
Status code to indicate that the input is invalid.
TFM_HAL_ERROR_NOT_SUPPORTED
Status code to indicate that the requested operation or a parameter is not supported.
TFM_HAL_ERROR_BAD_STATE
Status code to indicate that the requested action cannot be performed in the current state.
TFM_HAL_ERROR_MAX_VALUE
Status code to indicate that the current number has got the max value.
TFM_HAL_ERROR_MEM_FAULT
Status code to indicate that the memory check failed.
API Definition for TF-M SPM
This section describes the APIs defined for TF-M SPM.
Platform API
The platform API is a higher-level abstraction layer of the platform, other than a dedicated API set for the special hardware devices.
APIs
tfm_hal_platform_init()
Prototype
enum tfm_hal_status_t tfm_hal_platform_init(void)
Description
This API performs the platform initializations before the SPM initialization.
The initializations could include but not limited to: - Fault handlers - Reset configurations - Debug init - NVIC init
Parameter
void- None.
Return Values
TFM_HAL_SUCCESS- Init success.TFM_HAL_ERROR_GENERIC- Generic errors.
tfm_hal_system_reset()
Prototype
void tfm_hal_system_reset(void)
Description
This API performs a system reset.
The platform can uninitialize some resources before reset.
When CONFIG_TFM_HALT_ON_CORE_PANIC is disabled this function is called to reset
the system when a fatal error occurs.
Parameter
void- None
Return Values
void- None
Note
This API should not return.
tfm_hal_system_halt()
Prototype
void tfm_hal_system_halt(void)
Description
This API enters the CPU into an infinite loop.
The platform can uninitialize some resources before looping forever.
When CONFIG_TFM_HALT_ON_CORE_PANIC is enabled this function is called to halt the
system when a fatal error occurs.
Parameter
void- None
Return Values
void- None
Note
This API should not return.
Isolation API
The PSA-FF-M defines three isolation levels and a memory access rule to provide diverse levels of security. The isolation API provides the functions to implement these requirements.
The Isolation API operates on boundaries. A boundary represents a set of protection settings that isolates components and domains. Below are the boundary examples in the current implementation:
Boundaries between SPM and Secure Partitions.
Boundaries between ARoT domain and PRoT domain.
There are two types of boundaries:
Static boundaries: Set up when the system is initializing and persistent after the initialization. This type of boundary needs the set-up operations only.
Partition boundaries: Keeps switching from one to another when the system is running. This type of boundary needs both set-up and switching operations.
The boundary operations are abstracted as HAL interfaces because isolation hardwares can be different for platforms:
The set-up HAL interface creates a partition boundary based on given partition information. This created boundary is bound with the partition for subsequent usage. The binding is done by storing the boundary into partition runtime data.
The activation HAL interface activates the partition boundary to secure the execution for the partition to be switched. The target partition’s information and boundary are given to the activation HAL to accomplish the operation.
The data representing the partition boundary in runtime is defined with the
opaque type uintptr_t:
It is required that one value represents one boundary. The different values represent different boundaries.
The value is created by HAL implementation with its own-defined encoding scheme.
The HAL implementation defined encoding scheme can be designed for implementation convenience. For example:
The implementation scheme can encode attribute flags into integer bits. This could help the activation HAL to extract the protection settings quickly from this encoded value, or even write to hardware registers directly in the most ideal case. The initial TF-M Isolation HAL reference implementation applies this scheme.
The implementation scheme can reference the addresses of isolation hardware description data. This could help the activation HAL to reference the protection settings directly by pointers.
Multiple Secure Partitions can bind with the same boundary value. This flexibility is useful for specific configurations. Take Isolation Level 2 as an example, assigning PRoT and ARoT domain boundaries to respective partitions can make execution more efficient, because switching two partitions in the same domain does not need to change the activated boundary.
The boundary contains the partition’s memory accessibility information, hence memory access check shall be performed based on boundary.
Memory Access Attributes
The memory access attributes are encoded as bit fields, you can logic OR them to
have a combination of the atrributes, for example
TFM_HAL_ACCESS_UNPRIVILEGED | TFM_HAL_ACCESS_READABLE is unprivileged
readable. The data type is uint32_t.
TFM_HAL_ACCESS_EXECUTABLE
The memory is executable.
#define TFM_HAL_ACCESS_EXECUTABLE (1UL << 0)
TFM_HAL_ACCESS_READABLE
The memory is readable.
#define TFM_HAL_ACCESS_READABLE (1UL << 1)
TFM_HAL_ACCESS_WRITABLE
The memory is writable.
#define TFM_HAL_ACCESS_WRITABLE (1UL << 2)
TFM_HAL_ACCESS_UNPRIVILEGED
The memory is unprivileged mode accessible.
#define TFM_HAL_ACCESS_UNPRIVILEGED (1UL << 3)
TFM_HAL_ACCESS_DEVICE
The memory is a MMIO device.
#define TFM_HAL_ACCESS_DEVICE (1UL << 4)
TFM_HAL_ACCESS_NS
The memory is accessible from NSPE
#define TFM_HAL_ACCESS_NS (1UL << 5)
APIs
tfm_hal_verify_static_boundaries()
Prototype
fih_int tfm_hal_verify_static_boundaries(void)
Description
This API verifies the static isolation boundaries.
Refer to the PSA-FF-M for the definitions of the isolation boundaries.
Parameter
void- None
Return Values
TFM_HAL_SUCCESS- Verification has been successful.TFM_HAL_ERROR_GENERIC- Verification failed.
tfm_hal_set_up_static_boundaries()
Prototype
enum tfm_hal_status_t tfm_hal_set_up_static_boundaries(void)
Description
This API sets up the static isolation boundaries which are constant throughout the system runtime.
These boundaries include:
The boundary to protect the SPM execution. For example, the PSA RoT isolation boundary between the PSA Root of Trust and the Application Root of Trust which is for isolation level 2 and 3 only.
Refer to the PSA-FF-M for the definitions of the isolation boundaries.
Parameter
void- None
Return Values
TFM_HAL_SUCCESS- Isolation boundaries have been set up.TFM_HAL_ERROR_GENERIC- Failed to set up the static boundaries.
tfm_hal_bind_boundary()
Prototype
enum tfm_hal_status_t tfm_hal_bind_boundary(
const struct partition_load_info_t *p_ldinf,
uintptr_t *p_boundary);
Description
This API binds partition with a platform-generated boundary. The boundary is
bound by writing the generated value into p_boundary. And this bound
boundary is used in subsequent calls to tfm_hal_activate_boundary() when
boundary’s owner partition get scheduled for running.
Parameter
p_ldinf- Load information of the partition that is under loading.p_boundary- Pointer for holding a partition’s boundary.
Return Values
TFM_HAL_SUCCESS- The boundary has been bound successfully.TFM_HAL_ERROR_GENERIC- Failed to bind the handle.
tfm_hal_activate_boundary()
Prototype
enum tfm_hal_status_t tfm_hal_activate_boundary(
const struct partition_load_info_t *p_ldinf,
uintptr_t boundary);
Description
This API requires the platform to activate the boundary to ensure the given Secure Partition can run successfully.
The access permissions outside the boundary is platform-dependent.
Parameter
p_ldinf- The load information of the partition that is going to be run.boundary- The boundary for the owner partition ofp_ldinf. This value is bound in functiontfm_hal_bind_boundary.
Return Values
TFM_HAL_SUCCESS- the isolation boundary has been set up.TFM_HAL_ERROR_GENERIC- failed to set up the isolation boundary.
tfm_hal_memory_check()
Prototype
tfm_hal_status_t tfm_hal_memory_check(uintptr_t boundary,
uintptr_t base,
size_t size,
uint32_t access_type)
Description
This API checks if a given range of memory can be accessed with specified access types in boundary. The boundary belongs to a partition which contains asset info.
Parameter
boundary- Boundary of a Secure Partition. Check tfm_hal_bind_boundary for details.base- The base address of the region.size- The size of the region.access_type- The memory access types to be checked between given memory and boundaries. The Memory Access Attributes.
Return Values
TFM_HAL_SUCCESS- The memory region has the access permissions.TFM_HAL_ERROR_MEM_FAULT- The memory region does not have the access permissions.TFM_HAL_ERROR_INVALID_INPUT- Invalid inputs.TFM_HAL_ERROR_GENERIC- An error occurred.
Note
If the implementation chooses to encode a pointer as the boundary, a platform-specific pointer validation needs to be considered before referencing the content in this pointer.
tfm_hal_boundary_need_switch()
Prototype
bool tfm_hal_boundary_need_switch(uintptr_t boundary_from,
uintptr_t boundary_to)
Description
This API let the platform decide if a boundary switch is needed.
Parameter
boundary_from- Boundary to switch from.boundary_to- Boundary to switch to.
Return Values
true- A switching is neededfalse- No need for a boundary switch
Log API
The log API is used by the TF-M log system. The log device could be uart, memory, usb, etc.
APIs
tfm_hal_output_partition_log()
Prototype
int32_t tfm_hal_output_partition_log(const unsigned char *str, uint32_t len)
Description
This API is called by Secure Partition to output logs.
Parameter
str- The string to output.len- Length of the string in bytes.
Return Values
Positive values - Number of bytes output.
TFM_HAL_ERROR_NOT_INIT- The log device has not been initialized.TFM_HAL_ERROR_INVALID_INPUT- Invalid inputs whenstrisNULLorlenis zero.
Note
None.
tfm_hal_output_spm_log()
Prototype
int32_t tfm_hal_output_spm_log(const unsigned char *str, uint32_t len)
Description
This API is called by SPM to output logs.
Parameter
str- The string to output.len- Length of the string in bytes.
Return Values
Positive numbers - Number of bytes output.
TFM_HAL_ERROR_NOT_INIT- The log device has not been initialized.TFM_HAL_ERROR_INVALID_INPUT- Invalid inputs whenstrisNULLorlenis zero.
Note
Please check TF-M log system for more information.
Interrupt APIs
The SPM HAL interrupt APIs are intended for operations on Interrupt Controllers of platforms.
APIs for control registers of interrupt sources are not in the scope of this set of APIs. Secure Partitions should define the APIs for managing interrupts with those MMIO registers.
APIs
tfm_hal_irq_enable()
Prototype
enum tfm_hal_status_t tfm_hal_irq_enable(uint32_t irq_num)
Description
This API enables an interrupt from the Interrupt Controller of the platform.
Parameter
irq_num- the interrupt to be enabled with a number
Return Values
TFM_HAL_ERROR_INVALID_INPUT- theirq_numexceeds The maximum supported number of external interrupts.TFM_HAL_ERROR_GENERIC- failed to enable the interrupt.TFM_HAL_SUCCESS- the interrupt is successfully enabled.
tfm_hal_irq_disable()
Prototype
enum tfm_hal_status_t tfm_hal_irq_disable(uint32_t irq_num)
Description
This API disables an interrupt from the Interrupt Controller of the platform.
Parameter
irq_num- the interrupt to be disabled with a number
Return Values
TFM_HAL_ERROR_INVALID_INPUT- theirq_numexceeds The maximum supported number of external interrupts.TFM_HAL_ERROR_GENERIC- failed to disable the interrupt.TFM_HAL_SUCCESS- the interrupt is successfully disabled.
tfm_hal_irq_clear_pending()
Prototype
enum tfm_hal_status_t tfm_hal_irq_clear_pending(uint32_t irq_num)
Description
This API clears an active and pending interrupt.
Parameter
irq_num- the interrupt to be disabled with a number
Return Values
TFM_HAL_ERROR_INVALID_INPUT- theirq_numexceeds The maximum supported number of external interrupts.TFM_HAL_ERROR_GENERIC- failed to clear the pending interrupt.TFM_HAL_SUCCESS- the pending interrupt has been cleared.
Initializations
Prototype
enum tfm_hal_status_t {source_symbol}_init(void *p_pt,
const struct irq_load_info_t *p_ildi)
The {source_symbol} is:
irq_{source}, if thesourceattribute of the IRQ in Partition manifest is a numberLowercase of
sourceattribute, ifsourceis a symbolic name
Description
Each interrupt has an initialization function individually. The SPM calls the functions while loading the Partitions.
The following initializations are required for each interrupt:
Setting the priority. The value must between 0 to 0x80 exclusively.
Ensuring that the interrupt targets the Secure State.
Saving the input parameters for future use.
Platforms can have extra initializations as well.
Parameter
p_pt- pointer to Partition runtime struct of the owner Partitionp_ildi- pointer toirq_load_info_tstruct of the interrupt
Note
Please refer to the :doc: IRQ intergration guide<tfm_secure_irq_integration_guide> for more information.
API Definition for Secure Partitions
The Secure Partition (SP) HAL mainly focuses on two parts:
Peripheral devices. The peripherals accessed by the TF-M default Secure Partitions.
Secure Partition abstraction support. The Secure Partition data that must be provided by the platform.
The Secure Partition abstraction support will be introduced in the peripheral API definition.
ITS and PS flash API
There are two kinds of flash:
Internal flash. Accessed by the PSA Internal Trusted Storage (ITS) service.
External flash. Accessed by the PSA Protected Storage (PS) service.
The ITS HAL for the internal flash device is defined in the tfm_hal_its.h
header and the PS HAL in the tfm_hal_ps.h header.
Macros
Internal Trusted Storage
TFM_HAL_ITS_FLASH_DRIVER
Defines the identifier of the CMSIS Flash ARM_DRIVER_FLASH object to use for ITS. It must have been allocated by the platform and will be declared extern in the HAL header.
TFM_HAL_ITS_PROGRAM_UNIT
Defines the size of the ITS flash device’s physical program unit (the smallest unit of data that can be individually programmed to flash). It must be equal to TFM_HAL_ITS_FLASH_DRIVER.GetInfo()->program_unit, but made available at compile time so that filesystem structures can be statically sized.
TFM_HAL_ITS_FLASH_AREA_ADDR
Defines the base address of the dedicated flash area for ITS.
TFM_HAL_ITS_FLASH_AREA_SIZE
Defines the size of the dedicated flash area for ITS in bytes.
TFM_HAL_ITS_SECTORS_PER_BLOCK
Defines the number of contiguous physical flash erase sectors that form a logical filesystem erase block.
Protected Storage
TFM_HAL_PS_FLASH_DRIVER
Defines the identifier of the CMSIS Flash ARM_DRIVER_FLASH object to use for PS. It must have been allocated by the platform and will be declared extern in the HAL header.
TFM_HAL_PS_PROGRAM_UNIT
Defines the size of the PS flash device’s physical program unit (the smallest unit of data that can be individually programmed to flash). It must be equal to TFM_HAL_PS_FLASH_DRIVER.GetInfo()->program_unit, but made available at compile time so that filesystem structures can be statically sized.
TFM_HAL_PS_FLASH_AREA_ADDR
Defines the base address of the dedicated flash area for PS.
TFM_HAL_PS_FLASH_AREA_SIZE
Defines the size of the dedicated flash area for PS in bytes.
TFM_HAL_PS_SECTORS_PER_BLOCK
Defines the number of contiguous physical flash erase sectors that form a logical filesystem erase block.
Optional definitions
The TFM_HAL_ITS_FLASH_AREA_ADDR, TFM_HAL_ITS_FLASH_AREA_SIZE and
TFM_HAL_ITS_SECTORS_PER_BLOCK definitions are optional. If not defined, the
platform must implement tfm_hal_its_fs_info() instead.
Equivalently, tfm_hal_its_ps_info() must be implemented by the platform if
TFM_HAL_ITS_FLASH_AREA_ADDR, TFM_HAL_ITS_FLASH_AREA_SIZE or
TFM_HAL_ITS_SECTORS_PER_BLOCK is not defined.
Objects
ARM_DRIVER_FLASH
The ITS and PS HAL headers each expose a CMSIS Flash Driver instance.
extern ARM_DRIVER_FLASH TFM_HAL_ITS_FLASH_DRIVER
extern ARM_DRIVER_FLASH TFM_HAL_PS_FLASH_DRIVER
The CMSIS Flash Driver provides the flash primitives ReadData(), ProgramData() and EraseSector() as well as GetInfo() to access flash device properties such as the sector size.
Types
tfm_hal_its_fs_info_t
Struct containing information required from the platform at runtime to configure the ITS filesystem.
struct tfm_hal_its_fs_info_t {
uint32_t flash_area_addr;
size_t flash_area_size;
uint8_t sectors_per_block;
};
Each attribute is described below:
flash_area_addr- Location of the block of flash to use for ITS
flash_area_size- Number of bytes of flash to use for ITS
sectors_per_block- Number of erase sectors per logical FS block
tfm_hal_ps_fs_info_t
Struct containing information required from the platform at runtime to configure the PS filesystem.
struct tfm_hal_ps_fs_info_t {
uint32_t flash_area_addr;
size_t flash_area_size;
uint8_t sectors_per_block;
};
Each attribute is described below:
flash_area_addr- Location of the block of flash to use for PS
flash_area_size- Number of bytes of flash to use for PS
sectors_per_block- Number of erase sectors per logical FS block
Functions
tfm_hal_its_fs_info()
Prototype
enum tfm_hal_status_t tfm_hal_its_fs_info(struct tfm_hal_its_fs_info_t *fs_info);
Description
Retrieves the filesystem configuration parameters for ITS.
Parameter
fs_info- Filesystem config information
Return values
TFM_HAL_SUCCESS- The operation completed successfullyTFM_HAL_ERROR_INVALID_INPUT- Invalid parameter
Note
This function should ensure that the values returned do not result in a security compromise. The block of flash supplied must meet the security requirements of Internal Trusted Storage.
tfm_hal_ps_fs_info()
Prototype
enum tfm_hal_status_t tfm_hal_ps_fs_info(struct tfm_hal_ps_fs_info_t *fs_info);
Description
Retrieves the filesystem configuration parameters for PS.
Parameter
fs_info- Filesystem config information
Return values
TFM_HAL_SUCCESS- The operation completed successfullyTFM_HAL_ERROR_INVALID_INPUT- Invalid parameter
Note
This function should ensure that the values returned do not result in a security compromise.
Copyright (c) 2020-2024, Arm Limited. All rights reserved. Copyright (c) 2022 Cypress Semiconductor Corporation (an Infineon company) or an affiliate of Cypress Semiconductor Corporation. All rights reserved.