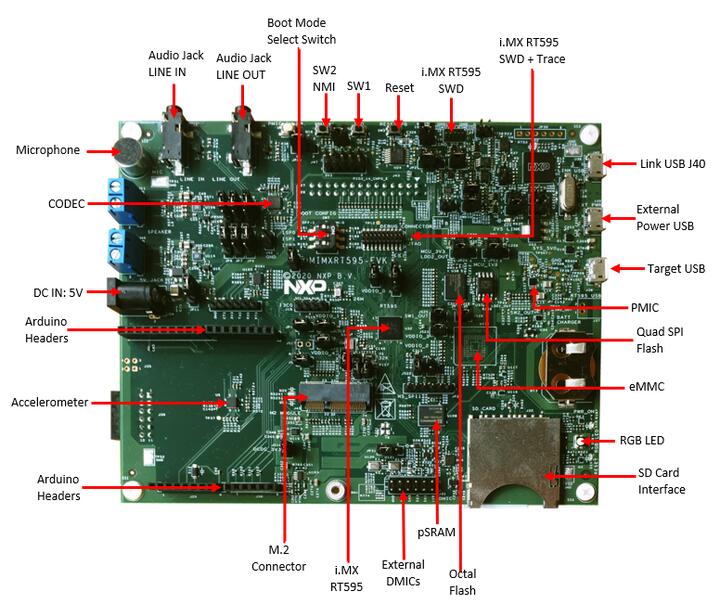
NXP MIMXRT595-EVK
Overview
i.MX RT500 crossover MCUs are part of the edge computing family and are optimized for low-power HMI applications by combining a graphics engine and a streamlined Cadence Tensilica Fusion F1 DSP core with a next-generation Arm Cortex-M33 core. These devices are designed to unlock the potential of display-based applications with a secure, power-optimized embedded processor.
i.MX RT500 MCUs provides up to 5MB of on-chip SRAM and several high-bandwidth interfaces to access off-chip flash, including an Octal/Quad SPI interface with an on-the-fly decryption engine.
Hardware
MIMXRT595SFFOC Cortex-M33 (275 MHz) core processor with Cadence Tensilica Fusion F1 DSP
Onboard, high-speed USB, Link2 debug probe with CMSIS-DAP protocol (supporting Cortex M33 debug only)
USB2.0 high-speed host and device with micro USB connector and external crystal
Octal/Quad/pSRAM external memories via FlexSPI
5 MB system SRAM
Full size SD card slot (SDIO)
On-board eMMC chip
On-board 5 V inputs NXP PCA9420UK PMIC providing 1.2 V, 1.8 V, 3.3 V
User LEDs
Reset and User buttons
MIPI-DSI connector
Single row headers for ARDUINO signals and MikroBus connector
FlexIO connector for MikroElektronica TFT Proto 5 inch capacitive touch display
One motion sensor combo accelero-/magneto-meter NXP FXOS8700CQ
Stereo audio codec with line-In/ line-Out/ and Microphone
Pmod/host expansion connector
NXP TFA9896 audio digital amplifier
Support for up to eight off-board digital microphones via 12-pin header
Two on-board digital microphones
For more information about the MIMXRT595 SoC and MIMXRT595-EVK board, see these references:
Supported Features
NXP considers the MIMXRT595-EVK as a superset board for the i.MX RT5xx family of MCUs. This board is a focus for NXP’s Full Platform Support for Zephyr, to better enable the entire RT5xx family. NXP prioritizes enabling this board with new support for Zephyr features. The mimxrt595_evk board configuration supports the hardware features below. Another very similar board is the NXP MIMXRT685-EVK, and that board may have additional features already supported, which can also be re-used on this mimxrt595_evk board:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
SYSTICK |
on-chip |
systick |
OS_TIMER |
on-chip |
os timer |
IOCON |
on-chip |
pinmux |
GPIO |
on-chip |
gpio |
USART |
on-chip |
serial port-polling; serial port-interrupt |
CLOCK |
on-chip |
clock_control |
I2C |
on-chip |
i2c |
SPI |
on-chip |
spi |
CTIMER |
on-chip |
counter |
WDT |
on-chip |
watchdog |
FLASH |
on-chip |
OctalSPI Flash |
TRNG |
on-chip |
entropy |
USB |
on-chip |
USB device |
FLEXSPI |
on-chip |
flash programming |
RTC |
on-chip |
counter |
PM |
on-chip |
power management; uses SoC sleep, deep sleep and deep-powerdown modes |
SDHC |
on-chip |
disk access (works with eMMC & SD) |
I2S |
on-chip |
i2s |
DISPLAY |
on-chip |
LCDIF; MIPI-DSI. Tested with RK055HDMIPI4M MIPI Display, RK055HDMIPI4MA0 MIPI Display, and G1120B0MIPI MIPI Display display shields |
DMIC |
on-chip |
dmic |
The default configuration can be found in the defconfig file:
Other hardware features are not currently supported by the port.
Connections and IOs
The MIMXRT595 SoC has IOCON registers, which can be used to configure the functionality of a pin.
Name |
Function |
Usage |
|---|---|---|
PIO0_2 |
USART0 |
USART RX |
PIO0_1 |
USART0 |
USART TX |
PIO0_14 |
GPIO |
GREEN LED |
PIO0_25 |
GPIO |
SW0 |
PIO0_10 |
GPIO |
SW1 |
PIO4_30 |
USART12 |
USART TX |
PIO4_31 |
USART12 |
USART RX |
PIO0_29 |
I2C |
I2C SCL |
PIO0_30 |
I2C |
I2C SDA |
PIO0_22 |
GPIO |
FXOS8700 TRIGGER |
PIO1_5 |
SPI |
SPI MOSI |
PIO1_4 |
SPI |
SPI MISO |
PIO1_3 |
SPI |
SPI SCK |
PIO1_6 |
SPI |
SPI SSEL |
PIO0_5 |
SCT0 |
SCT0 GPI0 |
PIO0_6 |
SCT0 |
SCT0 GPI1 |
System Clock
The MIMXRT595 EVK is configured to use the OS Event timer as a source for the system clock.
Serial Port
The MIMXRT595 SoC has 13 FLEXCOMM interfaces for serial communication. One is configured as USART for the console and the remaining are not used.
Fusion F1 DSP Core
You can build a Zephyr application for the RT500 DSP core by targeting the F1 SOC. Xtensa toolchain supporting RT500 DSP core is included in Zephyr SDK. To build the hello_world sample for the RT500 DSP core:
$ west build -b mimxrt595_evk/mimxrt595s/f1 samples/hello_world
For detailed instructions on how to debug DSP firmware, please refer to this document: Getting Started with Xplorer for EVK-MIMXRT595
Programming and Debugging
Build and flash applications as usual (see Building an Application and Run an Application for more details).
Configuring a Debug Probe
A debug probe is used for both flashing and debugging the board. This board is configured by default to use the LPC-Link2.
Install the J-Link Debug Host Tools and make sure they are in your search path.
To connect the SWD signals to onboard debug circuit, install jumpers JP17, JP18 and JP19, if not already done (these jumpers are installed by default).
Follow the instructions in LPC-Link2 J-Link Onboard Debug Probe to program the J-Link firmware. Please make sure you have the latest firmware for this board.
Install the J-Link Debug Host Tools and make sure they are in your search path.
To disconnect the SWD signals from onboard debug circuit, remove jumpers J17, J18, and J19 (these are installed by default).
Connect the J-Link probe to J2 10-pin header.
See J-Link External Debug Probe for more information.
Install the LinkServer Debug Host Tools and make sure they are in your search path.
To update the debug firmware, please follow the instructions on MIMXRT595-EVK Debug Firmware
Configuring a Console
Connect a USB cable from your PC to J40, and use the serial terminal of your choice (minicom, putty, etc.) with the following settings:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Flashing
Here is an example for the Hello World application. This example uses the J-Link Debug Host Tools as default.
# From the root of the zephyr repository
west build -b mimxrt595_evk/mimxrt595s/cm33 samples/hello_world
west flash
Open a serial terminal, reset the board (press the RESET button), and you should see the following message in the terminal:
*** Booting Zephyr OS v2.7 ***
Hello World! mimxrt595_evk
Debugging
Here is an example for the Hello World application. This example uses the J-Link Debug Host Tools as default.
# From the root of the zephyr repository
west build -b mimxrt595_evk/mimxrt595s/cm33 samples/hello_world
west debug
Open a serial terminal, step through the application in your debugger, and you should see the following message in the terminal:
*** Booting Zephyr OS v2.7 ***
Hello World! mimxrt595_evk
Troubleshooting
If the debug probe fails to connect with the following error, it’s possible that the image in flash is interfering and causing this issue.
Remote debugging using :2331
Remote communication error. Target disconnected.: Connection reset by peer.
"monitor" command not supported by this target.
"monitor" command not supported by this target.
You can't do that when your target is `exec'
(gdb) Could not connect to target.
Please check power, connection and settings.
You can fix it by erasing and reprogramming the flash with the following steps:
Set the SW7 DIP switches to ON-ON-ON to prevent booting from flash.
Reset by pressing SW3
Run
west debugorwest flashagain with a known working Zephyr application (example “Hello World”).Set the SW5 DIP switches to OFF-OFF-ON to boot from flash.
Reset by pressing SW3