System Calls
User threads run with a reduced set of privileges than supervisor threads: certain CPU instructions may not be used, and they have access to only a limited part of the memory map. System calls (may) allow user threads to perform operations not directly available to them.
When defining system calls, it is very important to ensure that access to the
API’s private data is done exclusively through system call interfaces.
Private kernel data should never be made available to user mode threads
directly. For example, the k_queue APIs were intentionally not made
available as they store bookkeeping information about the queue directly
in the queue buffers which are visible from user mode.
APIs that allow the user to register callback functions that run in supervisor mode should never be exposed as system calls. Reserve these for supervisor-mode access only.
This section describes how to declare new system calls and discusses a few implementation details relevant to them.
Components
All system calls have the following components:
A C prototype prefixed with
__syscallfor the API. It will be declared in some header underinclude/or in anotherSYSCALL_INCLUDE_DIRSdirectory. This prototype is never implemented manually, instead it gets created by the scripts/build/gen_syscalls.py script. What gets generated is an inline function which either calls the implementation function directly (if called from supervisor mode) or goes through privilege elevation and validation steps (if called from user mode).An implementation function, which is the real implementation of the system call. The implementation function may assume that all parameters passed in have been validated if it was invoked from user mode.
A verification function, which wraps the implementation function and does validation of all the arguments passed in.
An unmarshalling function, which is an automatically generated handler that must be included by user source code.
C Prototype
The C prototype represents how the API is invoked from either user or supervisor mode. For example, to initialize a semaphore:
__syscall void k_sem_init(struct k_sem *sem, unsigned int initial_count,
unsigned int limit);
The __syscall attribute is very special. To the C compiler, it
simply expands to ‘static inline’. However to the post-build
scripts/build/parse_syscalls.py script, it indicates that this API is a system call.
The scripts/build/parse_syscalls.py script does some parsing of the function prototype,
to determine the data types of its return value and arguments, and has some
limitations:
Array arguments must be passed in as pointers, not arrays. For example,
int foo[]orint foo[12]is not allowed, but should instead be expressed asint *foo.Function pointers horribly confuse the limited parser. The workaround is to typedef them first, and then express in the argument list in terms of that typedef.
__syscallmust be the first thing in the prototype.
The preprocessor is intentionally not used when determining the set of system calls to generate. However, any generated system calls that don’t actually have a verification function defined (because the related feature is not enabled in the kernel configuration) will instead point to a special verification for unimplemented system calls. Data type definitions for APIs should not have conditional visibility to the compiler.
Any header file that declares system calls must include a special generated
header at the very bottom of the header file. This header follows the
naming convention syscalls/<name of header file>. For example, at the
bottom of include/sensor.h:
#include <syscalls/sensor.h>
C prototype functions must be declared in one of the directories
listed in the CMake variable SYSCALL_INCLUDE_DIRS. This list
always contains APPLICATION_SOURCE_DIR when
CONFIG_APPLICATION_DEFINED_SYSCALL is set, or
${ZEPHYR_BASE}/subsys/testsuite/ztest/include when
CONFIG_ZTEST is set. Additional paths can be added to the list
through the CMake command line or in CMake code that is run before
find_package(Zephyr ...) is run. ${ZEPHYR_BASE}/include
is always scanned for potential syscall prototypes.
Note that not all syscalls will be included in the final binaries.
CMake functions zephyr_syscall_header and
zephyr_syscall_header_ifdef are used to specify which header
files contain syscall prototypes where those syscalls must be
present in the final binaries. Note that header files inside
directories listed in CMake variable SYSCALL_INCLUDE_DIRS
will always have their syscalls present in final binaries.
To force all syscalls to be included in the final binaries,
turn on CONFIG_EMIT_ALL_SYSCALLS.
Invocation Context
Source code that uses system call APIs can be made more efficient if it is
known that all the code inside a particular C file runs exclusively in
user mode, or exclusively in supervisor mode. The system will look for
the definition of macros __ZEPHYR_SUPERVISOR__ or
__ZEPHYR_USER__, typically these will be added to the compiler
flags in the build system for the related files.
If
CONFIG_USERSPACEis not enabled, all APIs just directly call the implementation function.Otherwise, the default case is to make a runtime check to see if the processor is currently running in user mode, and either make the system call or directly call the implementation function as appropriate.
If
__ZEPHYR_SUPERVISOR__is defined, then it is assumed that all the code runs in supervisor mode and all APIs just directly call the implementation function. If the code was actually running in user mode, there will be a CPU exception as soon as it tries to do something it isn’t allowed to do.If
__ZEPHYR_USER__is defined, then it is assumed that all the code runs in user mode and system calls are unconditionally made.
Implementation Details
Declaring an API with __syscall causes some code to be generated in
C and header files by the scripts/build/gen_syscalls.py script, all of which can be found in
the project out directory under include/generated/:
The system call is added to the enumerated type of system call IDs, which is expressed in
include/generated/syscall_list.h. It is the name of the API in uppercase, prefixed withK_SYSCALL_.An entry for the system call is created in the dispatch table
_k_syscall_table, expressed ininclude/generated/syscall_dispatch.cThis table only contains syscalls where their corresponding prototypes are declared in header files when
CONFIG_EMIT_ALL_SYSCALLSis enabled:Indicated by CMake functions
zephyr_syscall_headerandzephyr_syscall_header_ifdef, orUnder directories specified in CMake variable
SYSCALL_INCLUDE_DIRS.
A weak verification function is declared, which is just an alias of the ‘unimplemented system call’ verifier. This is necessary since the real verification function may or may not be built depending on the kernel configuration. For example, if a user thread makes a sensor subsystem API call, but the sensor subsystem is not enabled, the weak verifier will be invoked instead.
An unmarshalling function is defined in
include/generated/<name>_mrsh.c
The body of the API is created in the generated system header. Using the
example of k_sem_init(), this API is declared in
include/kernel.h. At the bottom of include/kernel.h is:
#include <syscalls/kernel.h>
Inside this header is the body of k_sem_init():
static inline void k_sem_init(struct k_sem * sem, unsigned int initial_count, unsigned int limit)
{
#ifdef CONFIG_USERSPACE
if (z_syscall_trap()) {
arch_syscall_invoke3(*(uintptr_t *)&sem, *(uintptr_t *)&initial_count, *(uintptr_t *)&limit, K_SYSCALL_K_SEM_INIT);
return;
}
compiler_barrier();
#endif
z_impl_k_sem_init(sem, initial_count, limit);
}
This generates an inline function that takes three arguments with void return value. Depending on context it will either directly call the implementation function or go through a system call elevation. A prototype for the implementation function is also automatically generated.
The final layer is the invocation of the system call itself. All architectures
implementing system calls must implement the seven inline functions
_arch_syscall_invoke0() through _arch_syscall_invoke6(). These
functions marshal arguments into designated CPU registers and perform the
necessary privilege elevation. Parameters of API inline function, before being
passed as arguments to system call, are C casted to uintptr_t which matches
size of register.
Exception to above is passing 64-bit parameters on 32-bit systems, in which case
64-bit parameters are split into lower and higher part and passed as two consecutive
arguments.
There is always a uintptr_t type return value, which may be neglected if
not needed.
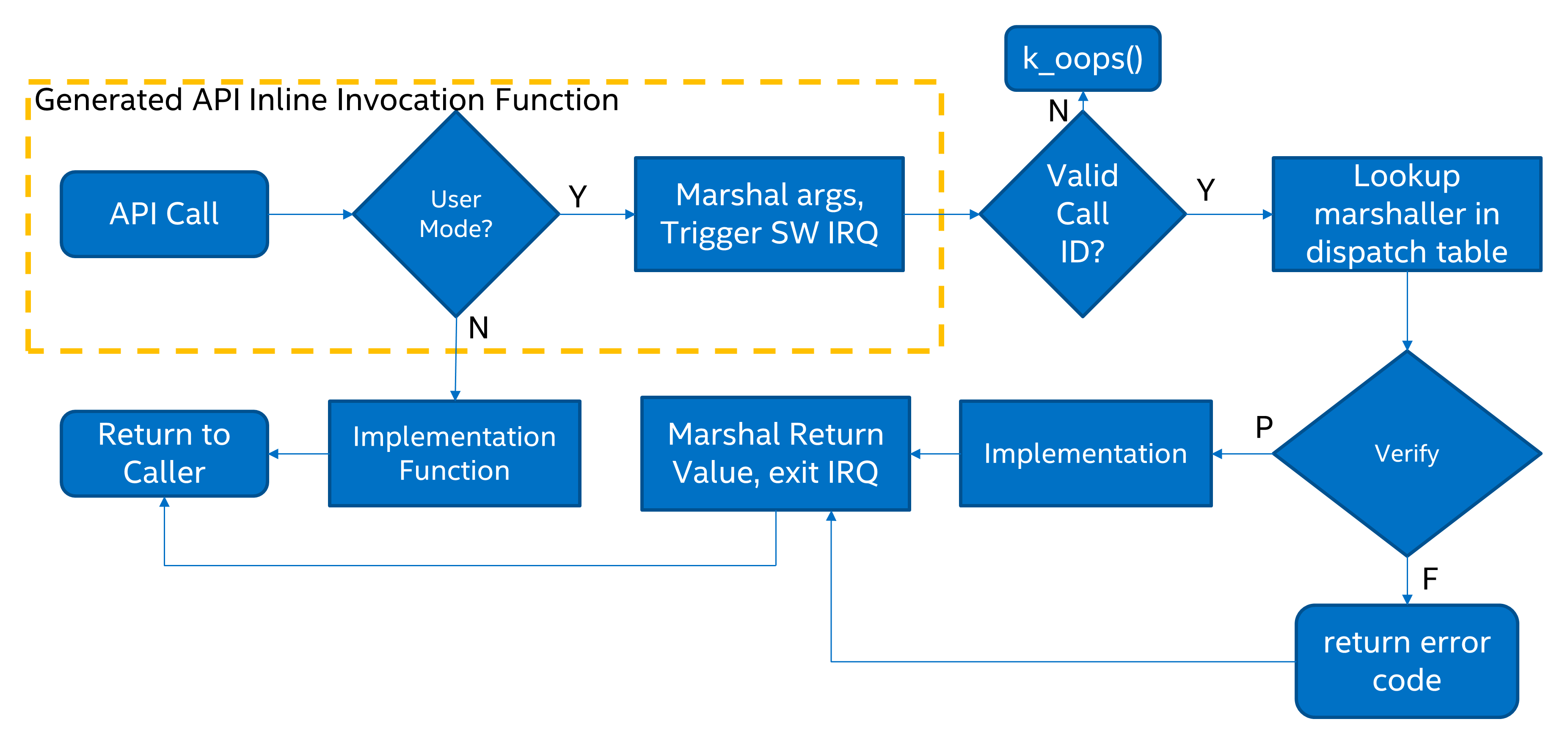
System Call execution flow
Some system calls may have more than six arguments, but number of arguments passed via registers is limited to six for all architectures. Additional arguments will need to be passed in an array in the source memory space, which needs to be treated as untrusted memory in the verification function. This code (packing, unpacking and validation) is generated automatically as needed in the stub above and in the unmarshalling function.
System calls return uintptr_t type value that is C casted, by wrapper, to
a return type of API prototype declaration. This means that 64-bit value may
not be directly returned, from a system call to its wrapper, on 32-bit systems.
To solve the problem the automatically generated wrapper function defines 64-bit
intermediate variable, which is considered untrusted buffer, on its stack
and passes pointer to that variable to the system call, as a final argument.
Upon return from the system call the value written to that buffer will be
returned by the wrapper function.
The problem does not exist on 64-bit systems which are able to return 64-bit
values directly.
Implementation Function
The implementation function is what actually does the work for the API. Zephyr normally does little to no error checking of arguments, or does this kind of checking with assertions. When writing the implementation function, validation of any parameters is optional and should be done with assertions.
All implementation functions must follow the naming convention, which is the
name of the API prefixed with z_impl_. Implementation functions may be
declared in the same header as the API as a static inline function or
declared in some C file. There is no prototype needed for implementation
functions, these are automatically generated.
Verification Function
The verification function runs on the kernel side when a user thread makes a system call. When the user thread makes a software interrupt to elevate to supervisor mode, the common system call entry point uses the system call ID provided by the user to look up the appropriate unmarshalling function for that system call and jump into it. This in turn calls the verification function.
Verification and unmarshalling functions only run when system call APIs are invoked from user mode. If an API is invoked from supervisor mode, the implementation is simply called and there is no software trap.
The purpose of the verification function is to validate all the arguments passed in. This includes:
Any kernel object pointers provided. For example, the semaphore APIs must ensure that the semaphore object passed in is a valid semaphore and that the calling thread has permission on it.
Any memory buffers passed in from user mode. Checks must be made that the calling thread has read or write permissions on the provided buffer.
Any other arguments that have a limited range of valid values.
Verification functions involve a great deal of boilerplate code which has been made simpler by some macros in include/zephyr/syscall_handler.h. Verification functions should be declared using these macros.
Argument Validation
Several macros exist to validate arguments:
Z_SYSCALL_OBJ()Checks a memory address to assert that it is a valid kernel object of the expected type, that the calling thread has permissions on it, and that the object is initialized.Z_SYSCALL_OBJ_INIT()is the same asZ_SYSCALL_OBJ(), except that the provided object may be uninitialized. This is useful for verifiers of object init functions.Z_SYSCALL_OBJ_NEVER_INIT()is the same asZ_SYSCALL_OBJ(), except that the provided object must be uninitialized. This is not used very often, currently only fork_thread_create().Z_SYSCALL_MEMORY_READ()validates a memory buffer of a particular size. The calling thread must have read permissions on the entire buffer.Z_SYSCALL_MEMORY_WRITE()is the same asZ_SYSCALL_MEMORY_READ()but the calling thread must additionally have write permissions.Z_SYSCALL_MEMORY_ARRAY_READ()validates an array whose total size is expressed as separate arguments for the number of elements and the element size. This macro correctly accounts for multiplication overflow when computing the total size. The calling thread must have read permissions on the total size.Z_SYSCALL_MEMORY_ARRAY_WRITE()is the same asZ_SYSCALL_MEMORY_ARRAY_READ()but the calling thread must additionally have write permissions.Z_SYSCALL_VERIFY_MSG()does a runtime check of some boolean expression which must evaluate to true otherwise the check will fail. A variantZ_SYSCALL_VERIFYexists which does not take a message parameter, instead printing the expression tested if it fails. The latter should only be used for the most obvious of tests.Z_SYSCALL_DRIVER_OP()checks at runtime if a driver instance is capable of performing a particular operation. While this macro can be used by itself, it’s mostly a building block for macros that are automatically generated for every driver subsystem. For instance, to validate the GPIO driver, one could use theZ_SYSCALL_DRIVER_GPIO()macro.Z_SYSCALL_SPECIFIC_DRIVER()is a runtime check to verify that a provided pointer is a valid instance of a specific device driver, that the calling thread has permissions on it, and that the driver has been initialized. It does this by checking the API structure pointer that is stored within the driver instance and ensuring that it matches the provided value, which should be the address of the specific driver’s API structure.
If any check fails, the macros will return a nonzero value. The macro
Z_OOPS() can be used to induce a kernel oops which will kill the
calling thread. This is done instead of returning some error condition to
keep the APIs the same when calling from supervisor mode.
Verifier Definition
All system calls are dispatched to a verifier function with a prefixed
z_vrfy_ name based on the system call. They have exactly the same
return type and argument types as the wrapped system call. Their job
is to execute the system call (generally by calling the implementation
function) after having validated all arguments.
The verifier is itself invoked by an automatically generated unmarshaller function which takes care of unpacking the register arguments from the architecture layer and casting them to the correct type. This is defined in a header file that must be included from user code, generally somewhere after the definition of the verifier in a translation unit (so that it can be inlined).
For example:
static int z_vrfy_k_sem_take(struct k_sem *sem, int32_t timeout)
{
Z_OOPS(Z_SYSCALL_OBJ(sem, K_OBJ_SEM));
return z_impl_k_sem_take(sem, timeout);
}
#include <syscalls/k_sem_take_mrsh.c>
Verification Memory Access Policies
Parameters passed to system calls by reference require special handling, because the value of these parameters can be changed at any time by any user thread that has access to the memory that parameter points to. If the kernel makes any logical decisions based on the contents of this memory, this can open up the kernel to attacks even if checking is done. This is a class of exploits known as TOCTOU (Time Of Check to Time Of Use).
The proper procedure to mitigate these attacks is to make a copies in the
verification function, and only perform parameter checks on the copies, which
user threads will never have access to. The implementation functions get passed
the copy and not the original data sent by the user. The
z_user_to_copy() and z_user_from_copy() APIs exist for
this purpose.
There is one exception in place, with respect to large data buffers which are only used to provide a memory area that is either only written to, or whose contents are never used for any validation or control flow. Further discussion of this later in this section.
As a first example, consider a parameter which is used as an output parameter for some integral value:
int z_vrfy_some_syscall(int *out_param)
{
int local_out_param;
int ret;
ret = z_impl_some_syscall(&local_out_param);
Z_OOPS(z_user_to_copy(out_param, &local_out_param, sizeof(*out_param)));
return ret;
}
Here we have allocated local_out_param on the stack, passed its address to
the implementation function, and then used z_user_to_copy() to fill
in the memory passed in by the caller.
It might be tempting to do something more concise:
int z_vrfy_some_syscall(int *out_param)
{
Z_OOPS(Z_SYSCALL_MEMORY_WRITE(out_param, sizeof(*out_param)));
return z_impl_some_syscall(out_param);
}
However, this is unsafe if the implementation ever does any reads to this memory as part of its logic. For example, it could be used to store some counter value, and this could be meddled with by user threads that have access to its memory. It is by far safest for small integral values to do the copying as shown in the first example.
Some parameters may be input/output. For instance, it’s not uncommon to see APIs
which pass in a pointer to some size_t which is a maximum allowable size,
which is then updated by the implementation to reflect the actual number of
bytes processed. This too should use a stack copy:
int z_vrfy_in_out_syscall(size_t *size_ptr)
{
size_t size;
int ret;
Z_OOPS(z_user_from_copy(&size, size_ptr, sizeof(size));
ret = z_impl_in_out_syscall(&size);
Z_OOPS(z_user_to_copy(size_ptr, &size, sizeof(size)));
return ret;
}
Many system calls pass in structures or even linked data structures. All should be copied. Typically this is done by allocating copies on the stack:
struct bar {
...
};
struct foo {
...
struct bar *bar_left;
struct bar *bar_right;
};
int z_vrfy_must_alloc(struct foo *foo)
{
int ret;
struct foo foo_copy;
struct bar bar_right_copy;
struct bar bar_left_copy;
Z_OOPS(z_user_from_copy(&foo_copy, foo, sizeof(*foo)));
Z_OOPS(z_user_from_copy(&bar_right_copy, foo_copy.bar_right,
sizeof(struct bar)));
foo_copy.bar_right = &bar_right_copy;
Z_OOPS(z_user_from_copy(&bar_left_copy, foo_copy.bar_left,
sizeof(struct bar)));
foo_copy.bar_left = &bar_left_copy;
return z_impl_must_alloc(&foo_copy);
}
In some cases the amount of data isn’t known at compile time or may be too
large to allocate on the stack. In this scenario, it may be necessary to draw
memory from the caller’s resource pool via z_thread_malloc(). This
should always be considered last resort. Functional safety programming
guidelines heavily discourage usage of heap and the fact that a resource pool is
used must be clearly documented. Any issues with allocation must be
reported, to a caller, with returning the -ENOMEM . The Z_OOPS()
should never be used to verify if resource allocation has been successful.
struct bar {
...
};
struct foo {
size_t count;
struct bar *bar_list; /* array of struct bar of size count */
};
int z_vrfy_must_alloc(struct foo *foo)
{
int ret;
struct foo foo_copy;
struct bar *bar_list_copy;
size_t bar_list_bytes;
/* Safely copy foo into foo_copy */
Z_OOPS(z_user_from_copy(&foo_copy, foo, sizeof(*foo)));
/* Bounds check the count member, in the copy we made */
if (foo_copy.count > 32) {
return -EINVAL;
}
/* Allocate RAM for the bar_list, replace the pointer in
* foo_copy */
bar_list_bytes = foo_copy.count * sizeof(struct_bar);
bar_list_copy = z_thread_malloc(bar_list_bytes);
if (bar_list_copy == NULL) {
return -ENOMEM;
}
Z_OOPS(z_user_from_copy(bar_list_copy, foo_copy.bar_list,
bar_list_bytes));
foo_copy.bar_list = bar_list_copy;
ret = z_impl_must_alloc(&foo_copy);
/* All done with the memory, free it and return */
k_free(foo_copy.bar_list_copy);
return ret;
}
Finally, we must consider large data buffers. These represent areas of user
memory which either have data copied out of, or copied into. It is permitted
to pass these pointers to the implementation function directly. The caller’s
access to the buffer still must be validated with Z_SYSCALL_MEMORY APIs.
The following constraints need to be met:
If the buffer is used by the implementation function to write data, such as data captured from some MMIO region, the implementation function must only write this data, and never read it.
If the buffer is used by the implementation function to read data, such as a block of memory to write to some hardware destination, this data must be read without any processing. No conditional logic can be implemented due to the data buffer’s contents. If such logic is required a copy must be made.
The buffer must only be used synchronously with the call. The implementation must not ever save the buffer address and use it asynchronously, such as when an interrupt fires.
int z_vrfy_get_data_from_kernel(void *buf, size_t size)
{
Z_OOPS(Z_SYSCALL_MEMORY_WRITE(buf, size));
return z_impl_get_data_from_kernel(buf, size);
}
Verification Return Value Policies
When verifying system calls, it’s important to note which kinds of verification
failures should propagate a return value to the caller, and which should
simply invoke Z_OOPS() which kills the calling thread. The current
conventions are as follows:
For system calls that are defined but not compiled, invocations of these missing system calls are routed to
handler_no_syscall()which invokesZ_OOPS().Any invalid access to memory found by the set of
Z_SYSCALL_MEMORYAPIs,z_user_from_copy(),z_user_to_copy()should trigger aZ_OOPS. This happens when the caller doesn’t have appropriate permissions on the memory buffer or some size calculation overflowed.Most system calls take kernel object pointers as an argument, checked either with one of the
Z_SYSCALL_OBJfunctions,Z_SYSCALL_DRIVER_nnnnn, or manually usingz_object_validate(). These can fail for a variety of reasons: missing driver API, bad kernel object pointer, wrong kernel object type, or improper initialization state. These issues should always invokeZ_OOPS().Any error resulting from a failed memory heap allocation, often from invoking
z_thread_malloc(), should propagate-ENOMEMto the caller.General parameter checks should be done in the implementation function, in most cases using
CHECKIF().The behavior of
CHECKIF()depends on the kernel configuration, but if user mode is enabled,CONFIG_RUNTIME_ERROR_CHECKSis enforced, which guarantees that these checks will be made and a return value propagated.
It is totally forbidden for any kind of kernel mode callback function to be registered from user mode. APIs which simply install callbacks shall not be exposed as system calls. Some driver subsystem APIs may take optional function callback pointers. User mode verification functions for these APIs must enforce that these are NULL and should invoke
Z_OOPS()if not.Some parameter checks are enforced only from user mode. These should be checked in the verification function and propagate a return value to the caller if possible.
There are some known exceptions to these policies currently in Zephyr:
k_thread_join()andk_thread_abort()are no-ops if the thread object isn’t initialized. This is because for threads, the initialization bit pulls double-duty to indicate whether a thread is running, cleared upon exit. See #23030.k_thread_create()invokesZ_OOPS()for parameter checks, due to a great deal of existing code ignoring the return value. This will also be addressed by #23030.k_thread_abort()invokesZ_OOPS()if an essential thread is aborted, as the function has no return value.Various system calls related to logging invoke
Z_OOPS()when bad parameters are passed in as they do not propagate errors.
Configuration Options
Related configuration options:
APIs
Helper macros for creating system call verification functions are provided in include/zephyr/syscall_handler.h:
Z_SYSCALL_OBJ()Z_SYSCALL_OBJ_INIT()Z_SYSCALL_OBJ_NEVER_INIT()Z_OOPS()Z_SYSCALL_MEMORY_READ()Z_SYSCALL_MEMORY_WRITE()Z_SYSCALL_MEMORY_ARRAY_READ()Z_SYSCALL_MEMORY_ARRAY_WRITE()Z_SYSCALL_VERIFY_MSG()Z_SYSCALL_VERIFY
Functions for invoking system calls are defined in include/zephyr/syscall.h:
_arch_syscall_invoke0()_arch_syscall_invoke1()_arch_syscall_invoke2()_arch_syscall_invoke3()_arch_syscall_invoke4()_arch_syscall_invoke5()_arch_syscall_invoke6()