Peripheral and Hardware Emulators
Overview
Zephyr supports a simple emulator framework to support testing of drivers without requiring real hardware.
Emulators are used to emulate hardware devices, to support testing of various subsystems. For example, it is possible to write an emulator for an I2C compass such that it appears on the I2C bus and can be used just like a real hardware device.
Emulators often implement special features for testing. For example a compass may support returning bogus data if the I2C bus speed is too high, or may return invalid measurements if calibration has not yet been completed. This allows for testing that high-level code can handle these situations correctly. Test coverage can therefore approach 100% if all failure conditions are emulated.
Concept
The diagram below shows application code / high-level tests at the top. This is the ultimate application we want to run.
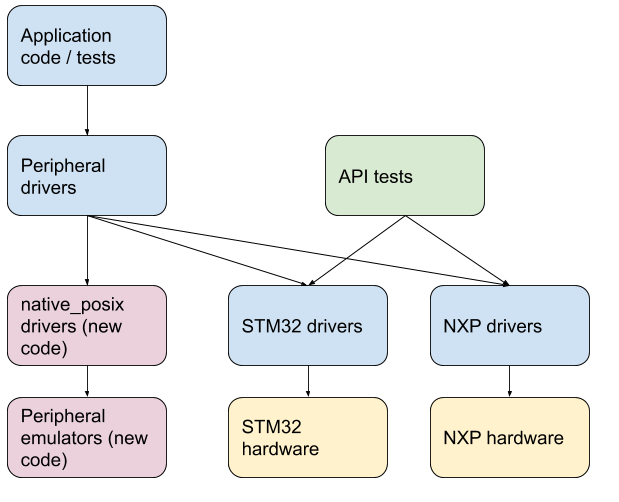
Below that are peripheral drivers, such as the AT24 EEPROM driver. We can test peripheral drivers using an emulation driver connected via a native_posix I2C controller/emulator which passes I2C traffic from the AT24 driver to the AT24 simulator.
Separately we can test the STM32 and NXP I2C drivers on real hardware using API tests. These require some sort of device attached to the bus, but with this, we can validate much of the driver functionality.
Putting the two together, we can test the application and peripheral code entirely on native_posix. Since we know that the I2C driver on the real hardware works, we should expect the application and peripheral drivers to work on the real hardware also.
Using the above framework we can test an entire application (e.g. Embedded Controller) on native_posix using emulators for all non-chip drivers:
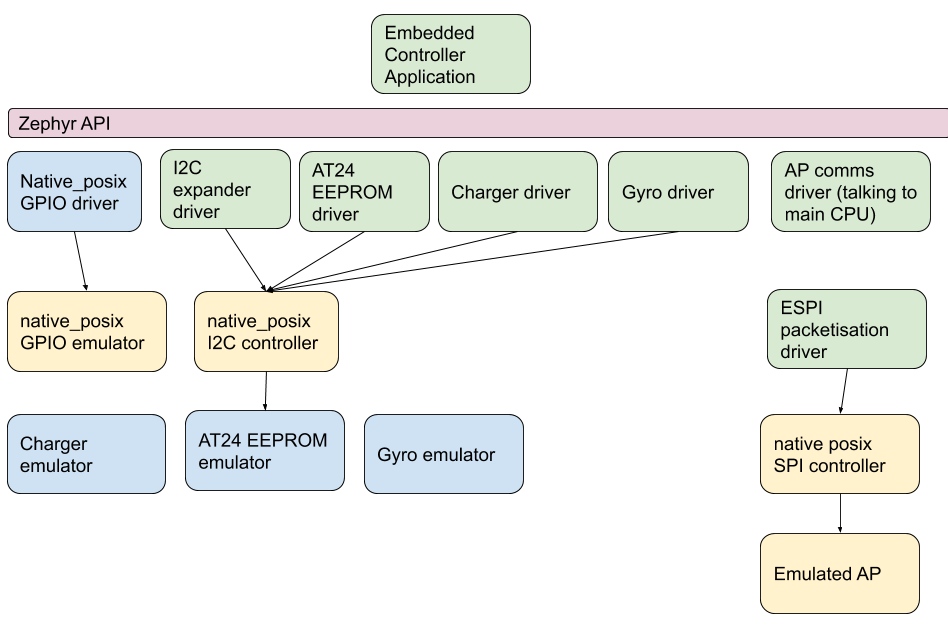
The ‘real’ code is shown in green. The Zephyr emulation-framework code is shown in yellow. The blue boxes are the extra code we have to write to emulate the peripherals.
With this approach we can:
Write individual tests for each driver (green), covering all failure modes, error conditions, etc.
Ensure 100% test coverage for drivers (green)
Write tests for combinations of drivers, such as GPIOs provided by an I2C GPIO expander driver talking over an I2C bus, with the GPIOs controlling a charger. All of this can work in the emulated environment or on real hardware.
Write a complex application that ties together all of these pieces and runs on native_posix. We can develop on a host, use source-level debugging, etc.
Transfer the application to any board which provides the required features (e.g. I2C, enough GPIOs), by adding Kconfig and devicetree fragments.
Creating a Device Driver Emulator
The emulator subsystem is modeled on the Device Driver Model. You create
an emulator instance using one of the EMUL_DT_DEFINE() or
EMUL_DT_INST_DEFINE() APIs.
Emulators for peripheral devices reuse the same devicetree node as the real
device driver. This means that your emulator defines DT_DRV_COMPAT using the
same compat value from the real driver.
/* From drivers/sensor/bm160/bm160.c */
#define DT_DRV_COMPAT bosch_bmi160
/* From subsys/emul/emul_bmi160.c */
#define DT_DRV_COMPAT bosch_bmi160
The EMUL_DT_DEFINE() function accepts two API types:
bus_api- This points to the API for the upstream bus that the emulator connects to. Thebus_apiparameter is required. The supported emulated bus types include I2C, SPI, and eSPI.
_backend_api- This points to the device-class specific backend API for the emulator. The_backend_apiparameter is optional.
The diagram below demonstrates the logical organization of the bus_api and
_backend_api using the BC1.2 charging detector driver as the model
device-class.
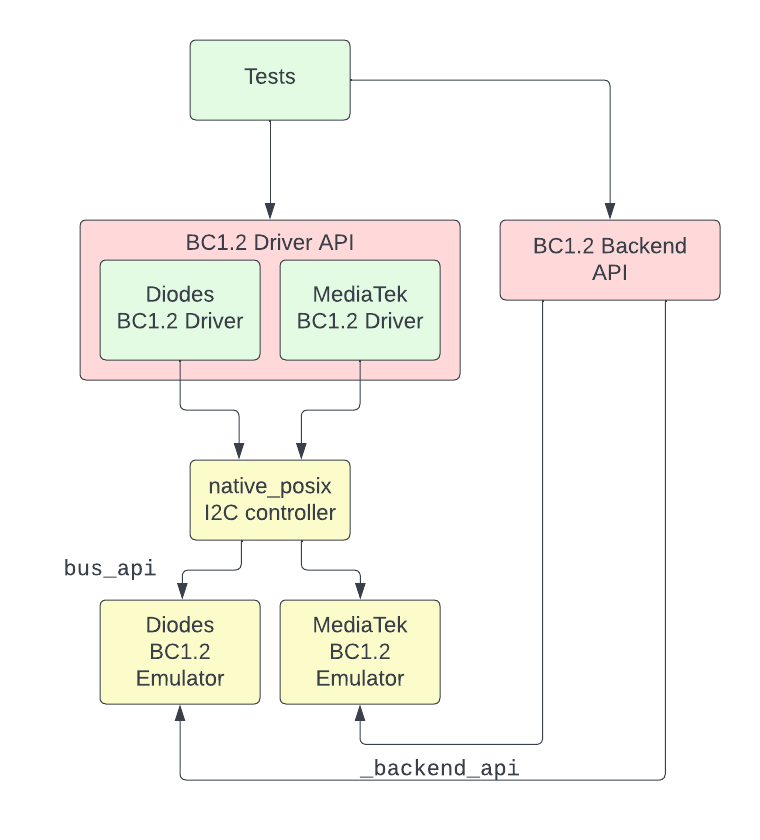
The real code is shown in green, while the emulator code is shown in yellow.
The bus_api connects the BC1.2 emulators to the native_posix I2C
controller. The real BC1.2 drivers are unchanged and operate exactly as if there
was a physical I2C controller present in the system. The native_posix I2C
controller uses the bus_api to initiate register reads and writes to the
emulator.
The _backend_api provides a mechanism for tests to manipulate the emulator
out of band. Each device class defines it’s own API functions. The backend API
functions focus on high-level behavior and do not provide hooks for specific
emulators.
In the case of the BC1.2 charging detector the backend API provides functions to simulate connecting and disconnecting a charger to the emulated BC1.2 device. Each emulator is responsible for updating the correct vendor specific registers and potentially signalling an interrupt.
Example test flow:
Test registers BC1.2 detection callback using the Zephyr BC1.2 driver API.
Test connects a charger using the BC1.2 emulator backend.
Test verifies B1.2 detection callback invoked with correct charger type.
Test disconnects a charger using the BC1.2 emulator backend.
With this architecture, the same test can be used will all supported drivers in the same driver class.
Available Emulators
Zephyr includes the following emulators:
EEPROM, which uses a file as the EEPROM contents
I2C emulator driver, allowing drivers to be connected to an emulator so that tests can be performed without access to the real hardware
SPI emulator driver, which does the same for SPI
eSPI emulator driver, which does the same for eSPI. The emulator is being developed to support more functionalities.
CAN loopback driver
A GPIO emulator is planned but is not yet complete.
Samples
Here are some examples present in Zephyr:
Bosch BMI160 sensor driver connected via both I2C and SPI to an emulator:
west build -b native_posix tests/drivers/sensor/accel/Simple test of the EEPROM emulator:
west build -b native_posix tests/drivers/eepromThe same test has a second EEPROM which is an Atmel AT24 EEPROM driver connected via I2C an emulator:
west build -b native_posix tests/drivers/eeprom
API Reference
- group io_emulators
Emulators used to test drivers and higher-level code that uses them.
Defines
-
EMUL_DT_NAME_GET(node_id)
Use the devicetree node identifier as a unique name.
- Parameters:
node_id – A devicetree node identifier
-
EMUL_DT_DEFINE(node_id, init_fn, data_ptr, cfg_ptr, bus_api, _backend_api)
Define a new emulator.
This adds a new struct emul to the linker list of emulations. This is typically used in your emulator’s DT_INST_FOREACH_STATUS_OKAY() clause.
- Parameters:
node_id – Node ID of the driver to emulate (e.g. DT_DRV_INST(n)); the node_id MUST have a corresponding DEVICE_DT_DEFINE().
init_fn – function to call to initialise the emulator (see emul_init typedef)
data_ptr – emulator-specific data
cfg_ptr – emulator-specific configuration data
bus_api – emulator-specific bus api
_backend_api – emulator-specific backend api
-
EMUL_DT_INST_DEFINE(inst, ...)
Like EMUL_DT_DEFINE(), but uses an instance of a DT_DRV_COMPAT compatible instead of a node identifier.
- Parameters:
inst – instance number. The
node_idargument to EMUL_DT_DEFINE is set toDT_DRV_INST(inst).... – other parameters as expected by EMUL_DT_DEFINE.
-
EMUL_DT_GET(node_id)
Get a
const struct emul*from a devicetree node identifier.Returns a pointer to an emulator object created from a devicetree node, if any device was allocated by an emulator implementation.
If no such device was allocated, this will fail at linker time. If you get an error that looks like
undefined reference to __device_dts_ord_<N>, that is what happened. Check to make sure your emulator implementation is being compiled, usually by enabling the Kconfig options it requires.- Parameters:
node_id – A devicetree node identifier
- Returns:
A pointer to the emul object created for that node
Typedefs
Enums
Functions
-
int emul_init_for_bus(const struct device *dev)
Set up a list of emulators.
- Parameters:
dev – Device the emulators are attached to (e.g. an I2C controller)
- Returns:
0 if OK
- Returns:
negative value on error
-
const struct emul *emul_get_binding(const char *name)
Retrieve the emul structure for an emulator by name.
Emulator objects are created via the EMUL_DT_DEFINE() macro and placed in memory by the linker. If the emulator structure is needed for custom API calls, it can be retrieved by the name that the emulator exposes to the system (this is the devicetree node’s label by default).
- Parameters:
name – Emulator name to search for. A null pointer, or a pointer to an empty string, will cause NULL to be returned.
- Returns:
pointer to emulator structure; NULL if not found or cannot be used.
-
struct emul_link_for_bus
- #include <emul.h>
Structure uniquely identifying a device to be emulated.
-
struct emul_list_for_bus
- #include <emul.h>
List of emulators attached to a bus.
Public Members
-
const struct emul_link_for_bus *children
Identifiers for children of the node.
-
unsigned int num_children
Number of children of the node.
-
const struct emul_link_for_bus *children
-
struct emul
- #include <emul.h>
An emulator instance - represents the target emulated device/peripheral that is interacted with through an emulated bus.
Instances of emulated bus nodes (e.g. i2c_emul) and emulators (i.e. struct emul) are exactly 1..1
Public Members
-
emul_init_t init
function used to initialise the emulator state
-
const void *cfg
Emulator-specific configuration data.
-
void *data
Emulator-specific data.
-
enum emul_bus_type bus_type
The bus type that the emulator is attached to.
-
const void *backend_api
Address of the API structure exposed by the emulator instance.
-
union bus
- #include <emul.h>
Pointer to the emulated bus node.
-
emul_init_t init
-
EMUL_DT_NAME_GET(node_id)