Installing the nRF Connect SDK manually¶
The recommended way to get started with the nRF Connect SDK is to use nRF Connect for Desktop. See the Installing the nRF Connect SDK through nRF Connect for Desktop section for information about how to install the nRF Connect SDK through nRF Connect for Desktop.
Note
If you use nRF Connect for Desktop to install the nRF Connect SDK, you can skip this section of the documentation. If you prefer to install the toolchain manually, or if you run into problems during the installation process, see the following documentation for instructions.
To manually install the nRF Connect SDK, you must install all required tools and clone the nRF Connect SDK repositories. See the following sections for detailed instructions.
The steps Install the required tools and Install the toolchain are similar to the installation steps in Zephyr’s Getting Started Guide. If you already have your system set up to work with the Zephyr OS, you can skip these steps.
See Supported operating systems for information on the supported operating systems and Zephyr features.
Install the required tools¶
The installation process is different depending on your operating system.
The recommended way for installing the required tools on Windows is to use Chocolatey, a package manager for Windows. Chocolatey installs the tools so that you can use them from a Windows command prompt.
To install the required tools, complete the following steps:
Open a
cmd.exewindow as Administrator. To do so, press the Windows key, type “cmd.exe”, right-click the result, and choose Run as Administrator.Disable global confirmation to avoid having to confirm the installation of individual programs:
choco feature enable -n allowGlobalConfirmationUse
chocoto install the required dependencies:choco install cmake --installargs 'ADD_CMAKE_TO_PATH=System' choco install ninja gperf python git
Close the window and open a new
cmd.exewindow as a regular user to continue.
To install the required tools on Ubuntu, complete the following steps:
Use
aptto install the required dependencies:sudo apt install --no-install-recommends git cmake ninja-build gperf \ ccache dfu-util device-tree-compiler wget \ python3-dev python3-pip python3-setuptools python3-tk python3-wheel xz-utils file \ make gcc gcc-multilib g++-multilib libsdl2-dev
Verify the version of cmake that is installed on your system by entering:
cmake --version
The version must be 3.13.1 or later. If your version is older, complete the following steps to add the Kitware third-party apt repository, which contains an updated version of cmake.
Add the Kitware signing key:
wget -O - https://apt.kitware.com/keys/kitware-archive-latest.asc 2>/dev/null | sudo apt-key add -
Add the Kitware apt repository for your OS release. For Ubuntu 18.04 LTS:
sudo apt-add-repository 'deb https://apt.kitware.com/ubuntu/ bionic main'Then install the updated version of cmake with
apt:sudo apt update sudo apt install cmake
For additional information and instructions for other Linux operating systems, see the Install Requirements and Dependencies section in the Zephyr documentation.
Note
You do not need to install the Zephyr SDK. We recommend to install the compiler toolchain separately, as detailed in Install the toolchain.
To install the required tools on macOS, complete the following steps:
Install Homebrew:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
Use
brewto install the required dependencies:brew install cmake ninja gperf python3 ccache qemu dtc
Also see macOS alternative setup instructions in the Zephyr documentation for additional information.
In addition to these required tools, install the GN meta-build system if you are interested in building Matter (formerly Project Connected Home over IP, Project CHIP) applications. This system generates the Ninja files that the nRF Connect SDK uses.
To install the GN tool, complete the following steps:
Download the latest version of the GN binary archive for Windows from the GN website.
Extract the
ziparchive.Ensure that the GN tool is added to your
PATHenvironment variable. See Setting Variables for instructions if needed.
To install the GN tool, complete the following steps:
Create the directory for the GN tool:
mkdir ${HOME}/gn && cd ${HOME}/gnDownload the GN binary archive and extract it by using the following commands:
wget -O gn.zip https://chrome-infra-packages.appspot.com/dl/gn/gn/linux-amd64/+/latest unzip gn.zip rm gn.zip
The wget tool is installed when installing the required tools on Linux.
Add the location of the GN tool to the system PATH. For example, if you are using
bash, run the following commands:echo 'export PATH=${HOME}/gn:"$PATH"' >> ${HOME}/.bashrc source ${HOME}/.bashrc
To install the GN tool, complete the following steps:
Create the directory for the GN tool:
mkdir ${HOME}/gn && cd ${HOME}/gnInstall the wget tool:
brew install wget
Download the GN binary archive and extract it by using the following commands:
wget -O gn.zip https://chrome-infra-packages.appspot.com/dl/gn/gn/mac-amd64/+/latest unzip gn.zip rm gn.zip
Add the location of the GN tool to the system PATH. For example, if you are using
bash, run the following commands:Create the
.bash_profilefile if you do not have it already:touch ${HOME}/.bash_profileAdd the location of the GN tool to
.bash_profile:echo 'export PATH=${HOME}/gn:"$PATH"' >> ${HOME}/.bash_profile source ${HOME}/.bash_profile
Install west¶
To manage the combination of repositories and versions, the nRF Connect SDK uses Zephyr’s west.
To install west, enter the following command:
pip3 install west
pip3 install --user west
pip3 install west
You only need to do this once.
Get the nRF Connect SDK code¶
The nRF Connect SDK consists of a set of Git repositories.
Every nRF Connect SDK release consists of a combination of these repositories at different revisions. The revision of each of those repositories is determined by the current revision of the main (or manifest) repository, sdk-nrf.
Note
The latest state of development is on the master branch of the sdk-nrf repository. To ensure a usable state, the sdk-nrf repository defines the compatible states of the other repositories. However, this state is not necessarily tested. For a higher degree of quality assurance, check out a tagged release.
Therefore, unless you are familiar with the development process, you should always work with a specific release of the nRF Connect SDK.
The main repository, sdk-nrf, contains a west manifest file, west.yml, that determines the revision of all other repositories.
This means that sdk-nrf acts as the manifest repository, while the other repositories are project repositories.
For more information about the repository and development model, see the development model section.
Tip
If you cloned the nRF Connect SDK repositories before they were moved to the nrfconnect GitHub organization and want to update them, follow the instructions in Pointing the repositories to the right remotes after they were moved.
To clone the repositories, complete the following steps:
Create a folder named
ncs. This folder will hold all nRF Connect SDK repositories.Open a command window in the
ncsfolder.Determine what revision of the nRF Connect SDK you want to work with. The recommended way is to work with a specific release.
To work with a specific release, the revision is the corresponding tag (for example,
v1.6.1). You can find the tag in the Release notes of the release.To work with a development tag, the revision is the corresponding tag (for example,
v1.2.99-dev1)To work with a branch, the revision is the branch name (for example,
masterto work with the latest state of development).To work with a specific state, the revision is the SHA (for example,
224bee9055d986fe2677149b8cbda0ff10650a6e).
Initialize west with the revision of the nRF Connect SDK that you want to check out, replacing NCS_revision with the revision:
west init -m https://github.com/nrfconnect/sdk-nrf --mr NCS_revision
For example, to check out the v1.6.1 release, enter the following command:
west init -m https://github.com/nrfconnect/sdk-nrf --mr v1.6.1
To check out the latest state of development, enter the following command:
west init -m https://github.com/nrfconnect/sdk-nrf --mr master
Note
If you get an error message when running west, update west to the latest version. See Troubleshooting West if you need more information.
Initializing west with a specific revision of the manifest file does not lock your repositories to this version. Checking out a different branch or tag in the sdk-nrf repository and running
west updatechanges the version of the nRF Connect SDK that you work with.This will clone the manifest repository sdk-nrf into
nrf.Enter the following command to clone the project repositories:
west update
Export a Zephyr CMake package. This allows CMake to automatically load the boilerplate code required for building nRF Connect SDK applications:
west zephyr-export
Your directory structure now looks similar to this:
ncs
|___ .west
|___ bootloader
|___ modules
|___ nrf
|___ nrfxlib
|___ zephyr
|___ ...
Note that there are additional folders, and that the structure might change. The full set of repositories and folders is defined in the manifest file.
Install additional Python dependencies¶
The nRF Connect SDK requires additional Python packages to be installed.
Use the following commands to install the requirements for each repository.
Open a command prompt in the ncs folder and enter the following commands:
pip3 install -r zephyr/scripts/requirements.txt pip3 install -r nrf/scripts/requirements.txt pip3 install -r bootloader/mcuboot/scripts/requirements.txt
Open a terminal window in the ncs folder and enter the following commands:
pip3 install --user -r zephyr/scripts/requirements.txt pip3 install --user -r nrf/scripts/requirements.txt pip3 install --user -r bootloader/mcuboot/scripts/requirements.txt
Open a terminal window in the ncs folder and enter the following commands:
pip3 install -r zephyr/scripts/requirements.txt pip3 install -r nrf/scripts/requirements.txt pip3 install -r bootloader/mcuboot/scripts/requirements.txt
Install the toolchain¶
To be able to cross-compile your applications for Arm targets, you must install version 9-2019-q4-major of the GNU Arm Embedded Toolchain.
Important
Make sure to install the version that is mentioned above. Other versions might not work with this version of the nRF Connect SDK.
Other versions of the nRF Connect SDK might require a different toolchain version.
To set up the toolchain, complete the following steps:
Download the GNU Arm Embedded Toolchain for your operating system.
Extract the toolchain into a folder of your choice. We recommend to use the folder
c:\gnuarmembon Windows and~/gnuarmembon Linux or macOS.Make sure that the folder name does not contain any spaces or special characters.
If you want to build and program applications from the command line, define the environment variables for the GNU Arm Embedded toolchain. Depending on your operating system:
Open a command prompt and enter the following commands (assuming that you have installed the toolchain to
c:\gnuarmemb; if not, change the value for GNUARMEMB_TOOLCHAIN_PATH):set ZEPHYR_TOOLCHAIN_VARIANT=gnuarmemb set GNUARMEMB_TOOLCHAIN_PATH=c:\gnuarmemb
Open a terminal window and enter the following commands (assuming that you have installed the toolchain to
~/gnuarmemb; if not, change the value for GNUARMEMB_TOOLCHAIN_PATH):export ZEPHYR_TOOLCHAIN_VARIANT=gnuarmemb export GNUARMEMB_TOOLCHAIN_PATH="~/gnuarmemb"
Open a terminal window and enter the following commands (assuming that you have installed the toolchain to
~/gnuarmemb; if not, change the value for GNUARMEMB_TOOLCHAIN_PATH):export ZEPHYR_TOOLCHAIN_VARIANT=gnuarmemb export GNUARMEMB_TOOLCHAIN_PATH="~/gnuarmemb"
Set the environment variables persistently. Depending on your operating system:
Add the environment variables as system environment variables or define them in the
%userprofile%\zephyrrc.cmdfile as described in Set up the command-line build environment. This lets you avoid setting them every time you open a command prompt.Define the environment variables in the
~/.zephyrrcfile as described in Set up the command-line build environment. This lets you avoid setting them every time you open a terminal window.Define the environment variables in the
~/.zephyrrcfile as described in Set up the command-line build environment. This lets you avoid setting them every time you open a terminal window.
Install the SEGGER Embedded Studio Nordic Edition¶
You must install the SEGGER Embedded Studio (SES) Nordic Edition to be able to open and compile projects in the nRF Connect SDK.
SEGGER Embedded Studio is free of charge for use with Nordic Semiconductor devices.
To install the SEGGER Embedded Studio Nordic Edition, complete the following steps:
Download the package for your operating system:
Extract the downloaded package in the directory of your choice.
Register and activate a free license. SEGGER Embedded Studio is free of charge for use with Nordic Semiconductor devices, but you still need to request and activate a license. Complete the following steps:
Run the file
bin/emStudio. SEGGER Embedded Studio will open the Dashboard window and inform you about the missing license.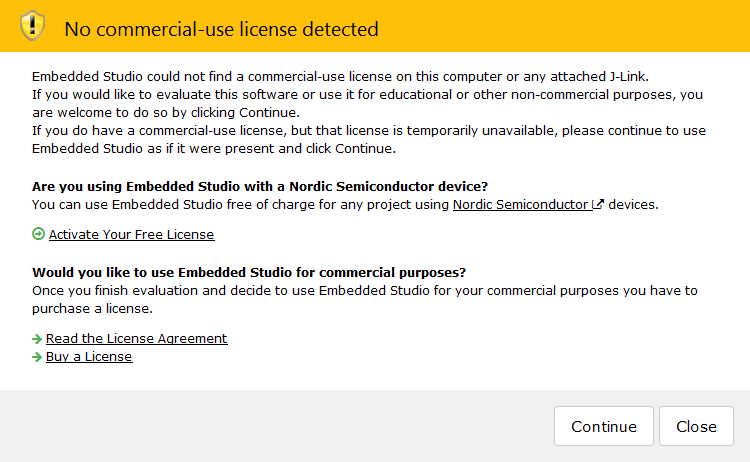
No commercial-use license detected SES prompt¶
Click Activate Your Free License. A request form appears.
Fill in your information and click Request License. The license is sent to you in an email.
After you receive your license key, click Enter Activation Key to activate the license.
Copy-paste the license key and click Install License. The license activation window will close and SES will open the Project Explorer window.
Note
Notifications about newer versions of SES are disabled in the SES Nordic Edition. This is because of the custom nRF Connect SDK options that are available only in the Nordic Edition. You will not be able to use SES with the nRF Connect SDK if you install the latest standard version of SES.
When you move to a newer release of the nRF Connect SDK, check the Required tools page for the given release to see if you are using the minimum required version of SES Nordic Edition. If you need to install the latest version of the SES Nordic Edition, follow the steps described above and make sure to set up the build environment in SES once more.
Set up the build environment in SES¶
Before you start building and programming a sample application, you must set up your build environment.
Set up the SES environment. If you plan to build with SEGGER Embedded Studio, the first time you import an nRF Connect SDK project, SES might prompt you to set the paths to the Zephyr Base directory and the GNU ARM Embedded Toolchain. You only need to do this once. Complete the following steps:
Run the file
bin/emStudio.Select File > Open nRF Connect SDK Project.
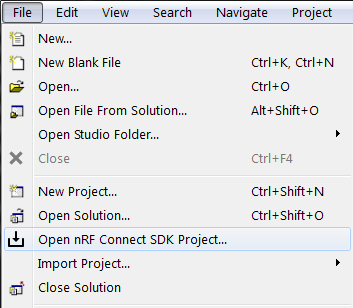
Open nRF Connect SDK Project menu¶
Set the Zephyr Base directory to the full path to
ncs/zephyr. The GNU ARM Embedded Toolchain directory is the directory where you installed the toolchain (for example,c:/gnuarmemb).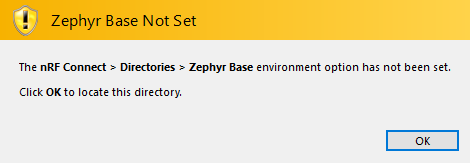
Zephyr Base Not Set prompt¶
Set up executables. The process is different depending on your operating system.
Make sure the locations of executable tools are added to the PATH variable, including Python, CMake, Ninja, and DTC. On Windows, SES uses the PATH variable to find executables if they are not set in SES.
Make sure the locations of executable tools are added to the PATH variable, including Python, CMake, Ninja, and DTC. On Linux, SES uses the PATH variable to find executables if they are not set in SES.
If you start SES on macOS by running the file
bin/emStudio, make sure to complete the following steps:Specify the path to all executables under Tools > Options (in the nRF Connect tab).
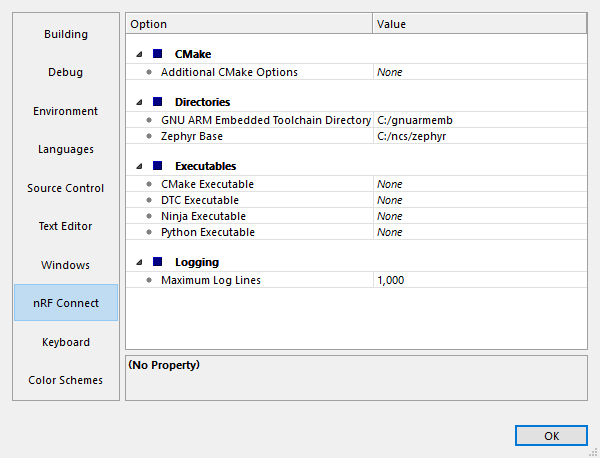
nRF Connect SDK options in SES (Windows)¶
Use this section to change the SES environment settings later as well.
Specify the path to the west tool as an additional CMake option, replacing path_to_west with the path to the west executable (for example,
/usr/local/bin/west):-DWEST=path_to_west
If you start SES from the command line, it uses the global PATH variable to find the executables. You do not need to explicitly configure the executables in SES.
Regardless of how you start SES, if you get an error that a tool or command cannot be found, first make sure that the tool is installed. If it is installed, verify that its path is configured correctly in the SES settings or in the PATH variable.
Change the SES environment settings. If you want to change the SES environment settings, click Tools > Options and select the nRF Connect tab, as shown on the following screenshot from the Windows installation.
nRF Connect SDK options in SES (Windows)¶
If you want to configure tools that are not listed in the SES options, add them to the PATH variable.
Set up the command-line build environment¶
The default build environment for the nRF Connect SDK is SES. However, you can also build and program your application from the command line. You have to set up your build environment by defining the required environment variables every time you open a new command prompt or terminal window.
See Important Build System Variables for more information about the various relevant environment variables.
Define the required environment variables as follows, depending on your operating system:
Navigate to the ncs folder and enter the following command: zephyr\zephyr-env.cmd
If you need to define additional environment variables, create the file %userprofile%\zephyrrc.cmd and add the variables there.
This file is loaded automatically when you run the above command.
See Option 3: Using zephyrrc files for more information.
Navigate to the ncs folder and enter the following command: source zephyr/zephyr-env.sh
If you need to define additional environment variables, create the file ~/.zephyrrc and add the variables there.
This file is loaded automatically when you run the above command.
See Option 3: Using zephyrrc files for more information.
Navigate to the ncs folder and enter the following command: source zephyr/zephyr-env.sh
If you need to define additional environment variables, create the file ~/.zephyrrc and add the variables there.
This file is loaded automatically when you run the above command.
See Option 3: Using zephyrrc files for more information.
You must also make sure that nrfjprog (part of the nRF Command Line Tools) is installed and its path is added to the environment variables. The west command programs the development kit by using nrfjprog by default. For more information on nrfjprog, see Programming SoCs with nrfjprog.